

1. λ³€ κΓ†
4λΑ® λ²Αλ½Öμ‰¹κΣÖ λù¥μ¦³ ꙀκΓ†λù³ μô€λö©μï€ κ΄Λλ•ëμï€ λ²§λ½Öλù¥ ξΒ≠κ²¥λôΗλ½êλ³€ μô€λö©κê‰ξ≥† λûàκ΄Λ. ξ≥Φξ±Α 뀳볱벧λß³ξ≥Φ μï≠ξ≥Β벧λß³λù‰ κΕ³λ³ùλùÄ λßÄμ‰ïξΒ§λΕïλù¥κ²‰ κΣ®κ΄àμ³Ακß¹ κ™±λ½ê μô€λö©κê‰λ½àλ€Φ겉 μôîλßàλ½ê κîΑκΞΗ λ†ïμôïκè³λù‰ κ§Η놀κΓ€ λ†ïλ³±λ†¹λùΗ λ‰¹μ•Ξκߨλù¥ μèâξΑÄλ½ê μï€λ†ïκê‰λ½àκ΄Λ. λΒ€ξΖΦ UAVλù‰ κΑ€κΣÖξ≥Φ κ΄Λλ•ëμï€ λ‰¹λɹκΕ³λ³ù λ³Φλ³€λù‰ μÉëλû§κΓ€ λ†ïκΑÄμï€ μï≠ξ≥Β벧λß³λù‰ κΕ³λ³ùλù¥ ξΑÄκäΞμï‰λ½§ κßéλùÄ κΕ³λïΦλ½êλ³€ UAVλù‰ μô€λö©λ³±λù¥ μôïλûΞκê‰ξ≥† λûàκ΄Λ. UAVκΞΦ λù¥λö©μï€ μï≠ξ≥Β벧λß³λù‰ λ¥§λ‰¹λùÄ λΙ¥κ©îκùΦλù‰ μôîλßàξΑ€λ³†λù³ μÜΒμï€ λ†ïμôïκè³ξΑÄ λΠùξΑÄκê‰λ•¥ λßÄμ‰ïλ†ïκ≥¥λôÄ ξΒ§λΓΑκ§Φ ξΒ§λΕï κ™±λ½ê μô€λö©κê‰ξ≥† λûàκ΄Λ. λΒ€ξΖΦ κ΄Λλ•ëμï€ μî³κΓ€ξΖΗκû®λù‰ ξΑ€κΑ€κΓ€ λ¥§λ‰¹κê€ μï≠ξ≥Β벧λß³λù³ 2D κΣ®κçΗ κ‰êκäî 3DκΓ€ κΣ®κçΗλù³ ξΒ§λΕïμï‰κ©¥λ³€ ξΒ§λΓΑκ§Φ, λû§κ²€, ξ±¥λ³Λ쉳λûΞλ½êλ³€ 벧λö©κê‰ξ≥† λûàκ΄Λ. λΒ€ξΖΦ κ§¥λùΗ κΙ³μ•âξΗΑ(Unmanned Aerial Vehicle, UAV)κΞΦ μô€λö©μï‰ξΗΑ λ€³μï€ κ΄Λλ•ëμï€ λ½ΑξΒ§ξΑÄ λà‰μ•âκê‰ξ≥† λûàκ΄Λ.
ξΒ≠κ²¥λôΗλù‰ UAVκΓ€ λà‰μ•âκê€ λ½ΑξΒ§κ²¥λö©λùÄ Digital Surface Model (DSM), λ†ïλ²§λ‰¹λɹ κ™±λù³ κΕ³λ³ùμï‰λ½§ λ†ïμôïκè³κΞΦ μèâξΑÄμï‰ξ±Α겉 λ†¹λö©λ³±λ½ê κ¨Äμï‰λ½§ 놀λïàμï‰λ‰Äκ΄Λ. UAVκΞΦ λù¥λö©μï‰λ½§ κ¨ÄλɹλßÄλ½≠λù‰ μï≠ξ≥Β벧λß³λù³ λ¥§λ‰¹μï‰λ½§ DEMλù³ λÉùλ³±μï‰ξ≥† λ†ïλ²§λ‰¹λɹ κ‰êκäî 벧λß³λù¥κ·ΗλßÄλôÄ κΙ³ξΒêμï‰λ½§ λ†ïμôïκè³κΞΦ κΕ³λ³ùμï‰λ‰Äκ΄Λ(Feurer et al., 2008; Sauerbier and Eisenbeiss, 2010; Lee et al., 2012; Lee, 2015; Lee et al., 2015; Ruzgiene et al., 2015; Uysal et al., 2015; Park et al., 2016; Bang et al., 2018). κ‰êμï€, λܨμî³μäΗ릮땥κΞΦ μô€λö©μï‰λ½§ κ¨Äκüâλù‰ μï≠ξ≥Β벧λß³λù³ κΕ³λ³ùμï‰λ½§ DEMξ≥Φ DSMλù³ ξΒ§λΕïμï‰ξ≥† λßÄμ‰ïλΗΓκüâξ≥Φ κΙ³ξΒêμï‰λ½§ λ†ïμôïκè³λù‰ ξ≤Αξ≥ΦκΞΦ κΙ³ξΒêμï‰λ‰Äκ΄Λ(Choi et al., 2015; Rhee et al., 2015; Lee et al., 2016; Lee and Choi, 2016; Coveney and Roberts, 2017). μï≠ξ≥Β벧λß³ λ¥§λ‰¹ξ≥Φ ξ≥†μ•âλɹκè³ λ‰¹λɹλù³ ξΗΑκΑ‰λ€ΦκΓ€ μï¥λïàλßÄλ½≠λù‰ λßÄμ‰ï κΣ®κ΄àμ³Ακß¹, λßÄμ‰ïλù‰ κ≥Äμôî κΣ®κ΄àμ³Ακß¹ ξΖΗκΠ§ξ≥† λßÄμ‰ïλù‰ λ≤¥λ†¹λ²Αλ†ï κ™±λù‰ UAVλù‰ μô€λö©λ³±κè³ λ†€λïàκê‰λ½àκ΄Λ(Goncalves and Henriques, 2015; PΟ©rez-Alberti and Trenhaile, 2015; Yu et al., 2016; Son et al., 2017). UAVκΞΦ μô€λö©μï€ μï≠ξ≥Β벧λß³λù‰ λ¥§λ‰¹λùÄ λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ κ¨ÄκΕÄκΕ³ 90¬Αλ½ê κ¨Äμï€ λ†ïλ²§λ‰¹λɹλù¥ κ¨ÄκΕÄκΕ³ μô€λö©κê‰ξ≥† λûàκ΄Λ. ξΒ§λΓΑκ§Φλ½êκäî κ΄Λλ•ëμï€ ξΑ¹κè³κΞΦ λΓΑλ†ïμï‰λ½§ λ¥§λ‰¹μï‰κùΦξ≥† 놀봀κê‰λ½àλù³ κΩê λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κ¨Äμï€ λ†ïμôïκè³ μèâξΑÄκäî λà‰μ•âκê‰λßÄ λïäλï‰κ΄Λ.
UAVκΓ€ λ¥§λ‰¹κê€ μï≠ξ≥Β벧λß³λù³ κΕ³λ³ùμï‰λ½§ λ†ïκüâλ†¹λùΗ λ‰ΛλΑ®λ€®λù³ 놀λïàμï‰ξ±Α겉 λ†ïμôïκè³κΞΦ κ≥¥λ†ïμï‰κäî κΑ©κ≤ïλù‰ λ½ΑξΒ§κè³ λà‰μ•âκê‰λ½àκ΄Λ. UAVλù‰ λ‰¹λɹλù³ DSMξ≥Φ 3D κΣ®κçΗκΓ€ ξΒ§λΕïμï† κï¨ ξΗΑλΛÄλ†êλù³ κ≥¥λ†ïμï‰λßÄ λïäλï‰λù³ κï¨λù‰ λ‰ΛλΑ®λ€®λù¥κ²‰ μï¥λɹκè³λù‰ λ†¹λ†ïλ³±λù¥ 놀λïàκê‰λ½àλ€Φ겉 κ΄ΛκΞΗ λ½ΑξΒ§λ½êλ³€κäî λßÄλɹξΗΑλΛÄλ†êλù‰ μï³λöîλ³±λù¥ 놀봀κê‰λ½àκ΄Λ(Udin and Ahmad, 2014; Rhee el al., 2015; Mesas- Carrascosa et al., 2016; AgΟΦera-Vega et al., 2017; Kim et al., 2018; Kim and Yoon, 2018; Park and Um, 2018). λßÄλɹ ξΗΑλΛÄλ†êλù³ ξ≥†κ†Λμï€ κɳ볆μ‰ï κΑ©κ≤ïλù³ ξΑ€κΑ€μï‰λ½§ λ΄ΛλΔ¨μë€ λ‰¹λɹλ€ΦκΓ€ κ≥Äμôîμï‰κäî κΑ©κ≤ïκè³ λ†€λïàκê‰λ½àκ΄Λ(Noh et al., 2011). UAVκΓ€ λ¥§λ‰¹μï€ μï≠ξ≥Β벧λß³λù³ ξΗΑκΑ‰λ€ΦκΓ€ ξΒ§λΕïκê€ λûêκΘ¨λù‰ λ†ïμôïκè³κΞΦ κΙ³ξΒêμï‰λ‰Äλ€Φ겉 κ΄Λλ•ëμï€ λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ ξ≥†κ†Λμï€ λ†ïκüâλ†¹λùΗ λ†ïμôïκè³ κΕ³λ³ùλùÄ λ½ΑξΒ§κê‰λßÄ λïäλï‰κ΄Λ.
κîΑκùΦλ³€, κ≥Η λ½ΑξΒ§λ½êλ³€κäî κ¨ÄξΒ§ξ¥ëλ½≠λ΄€λ½ê λ€³λΙ‰μï€ λôÄκΘΓκ¨ÄξΒêκΞΦ κ¨Äλɹλ€ΦκΓ€ UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ λΓΑλ†àμï‰λ½§ DSMξ≥Φ λ†ïλ²§λ‰¹λɹ, 3D κΣ®κçΗλù³ ξΒ§λΕïμï‰ξ≥†λûê μï€κ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³κäî 90¬Α, 75¬Α, 60¬Αλ½ê κ¨Äμï‰λ½§ UAVλ¥§λ‰¹λù³ λà‰μ•âμï‰λ‰Äλ€Φκ©Α ξ≥†κè³, κΙ³μ•âκΑ©κ≤ï, λΛëλ≤©κè³, κ©¥λ†¹λùÄ κèôλùΦμï€ λΓΑξ±¥λù³ λ†¹λö©μï‰λ‰Äκ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κîΑκΞΗ 2D κΣ®κçΗξ≥Φ 3D κΣ®κçΗλ½ê κΕ³λ³ùλ‰¹λɹλù‰ λ†ïκüâλ†¹λùΗ λ‰¹μ•Ξλù³ κΕ³λ³ùμï‰ξ≥†λûê μï€κ΄Λ.
2. λ½ΑξΒ§κΑ©κ≤ï
2.1 κ¨ÄλɹλßÄλ½≠
κ≥Η λ½ΑξΒ§λù‰ κ¨ÄλɹλßÄλ½≠λùÄ κ¨ÄξΒ§ξ¥ëλ½≠λ΄€κΞΦ μÜΒξ≥Φμï‰κäî ξΗàμ‰ΗξΑïλù‰ κΕ¹ξΒ§λôÄ λ³€ξΒ§κΞΦ λù¥λ•¥λΘΦκäî λôÄκΘΓκ¨ÄξΒêκΓ€λ³€ κ¨ÄξΒ§ξ¥ëλ½≠λ΄€ 괧볱ξΒΑ κ΄Λ벧λùç κΑ©λ≤€κΠ§λ½ê Fig. 1ξ≥Φ ξΑôλù¥ λ€³λΙ‰μï‰ξ≥† λûàκ΄Λ. κ¨ÄξΒ§ξ¥ëλ½≠λ΄€κäî κ¨ÄξΒ§ξΒ≠놀ξ≥Βμï≠λù¥ λ€³λΙ‰μï‰ξ≥† λûàλ•¥ κ¨ÄξΒ§ξ¥ëλ½≠λ΄€λù‰ λΛëξΒ§, κ²®ξΒ§, κΕ¹ξΒ§κäî κ¨ÄκΕÄκΕ³ κΙ³μ•âξΗàλßÄλ½≠λù¥κ©Α κ≥Η λ½ΑξΒ§λù‰ κ¨ÄλɹλßÄλ½≠λùÄ ξΒ≠μ܆ξΒêμÜΒκΕÄλù‰ κΙ³μ•â봆λ≤≠ λ½Üλù¥ λö¥λ‰¹ ξΑÄκäΞμï€ λßÄλ½≠λù³ 볆λ†ïμï‰λ‰Äκ΄Λ.
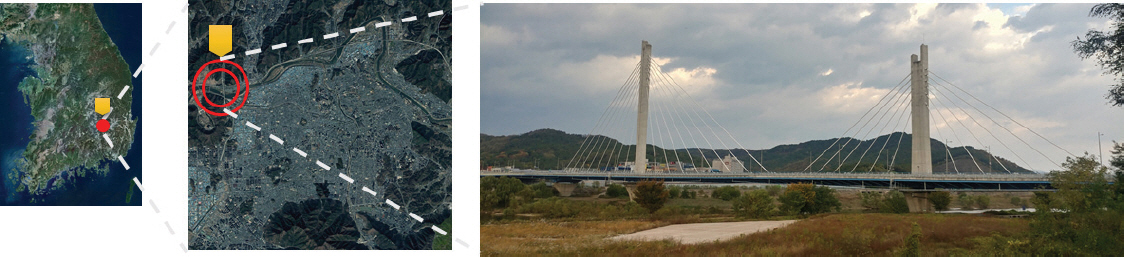
κ≥Η λ½ΑξΒ§λù‰ κ¨ÄλɹλßÄλ½≠λùΗ λôÄκΘΓκ¨ÄξΒêκäî κ¨ÄξΒ§ξ¥ëλ½≠λ΄€ λΒ€λ¥àλù‰ 벧λûΞξΒêκΓ€λ³€ κ΄ΛκΞΗ ξΒêκüâξ≥Φ κ΄§κΠ§ λΘΦμÉëλ½ê λΦÄλù¥κΗîλù³ λ½Αξ≤Αμï‰λ½§ ξΒêκüâλ½ê ξΑÄμï¥λßÄκäî μï‰λΛëλù³ λΘΦμÉëξ≥Φ λΦÄλù¥κΗîλ½ê 놳괧μï‰κäî μ‰ïλ΄ùλù¥κ΄Λ. λôÄκΘΓκ¨ÄξΒêλù‰ ξΒêκüâξΗΗλù¥κäî 477 m, ξΒêκüâμè≠λùÄ 32.3 mλù¥κ©Α λɹκΕÄμ‰ïλ΄ùλùÄ λ²§λûΞξΒê, μï‰κΕÄμ‰ïλ΄ùλùÄ λ½≠ Tμ‰ïλ΄ù κ¨ÄξΒêκΓ€ ξ±¥λ³Λκê‰λ½àκ΄Λ(Table 1). ξΒêκüâλù‰ 놀λ¦êλùÄ λ€†μö®μè≠ 25.5 m, ξΒêκüâλù‰ κÜ£λù¥ 24.0 m, ξΒêκüâλù‰ ξ≤ΫξΑ³λà‰ 5ξΑ€, λΒ€κ¨Äξ≤ΫξΑ³λà‰ 164 mκΓ€ 2010κÖ³λ½ê λΛÄξ≥Βκê‰λ½àκ΄Λ.
Table 1
Wanryong Bridge Specification
2.2 μï≠ξ≥Β벧λß³ λ¥§λ‰¹λù³ λ€³μï€ ξ¥ÄλΗΓλûΞκΙ³ 놀λ¦ê
μï≠ξ≥Β벧λß³ λ¥§λ‰¹λ½ê μô€λö©κê€ UAVκäî λΙ¥κ©îκùΦλù‰ μôîλßàξ≥Φ λïà놳볱λù‰ λΑ®λù¥κäî λûàλßÄκߨ κ¨ÄκΕÄκΕ³λù‰ UAVλù¥ μï≠ξ≥Β벧λß³λù‰ λ¥§λ‰¹λù¥ ξΑÄκäΞμï‰κ΄Λ. ξΖΗκü§κ²‰, λßÄμ‰ïλûêκΘ¨, ξ±¥λΕïκ§Φ, ξΗΑκΑ‰λ΄€λ³Λ κ™±λù‰ λ†ïκΑÄμï€ λΗΓκüâλù³ λ€³μï¥λ³€κäî 놳κ§Η λßÄκè³λ†€λûëλö©λù‰ μäΙλà‰λûΞκΙ³ξΑÄ μï³λöîμï‰κ΄Λ. ξΖΗκΠ§ξ≥† λ†ïμôïμï€ λΔ¨μë€λôÄ μï≠ξ≥Β벧λß³λù‰ λ¥§λ‰¹λ½êλ³€ κΑ€λÉùκê‰κäî λ‰ΛλΑ®κΞΦ λΛ³λù¥ξΗΑ λ€³μï€ κ≥¥λ†ïλûΞλΙ‰κ™Λλù¥ λ†¹λö©κê€ κΣ®κçΗλù³ 벧λö©μï¥λïΦ μï€κ΄Λ. κ≥Η λ½ΑξΒ§λ½êλ³€κäî λûêκèôκΙ³μ•âλù³ μÜΒμï€ μï≠ξ≥Β벧λß³ λ¥§λ‰¹ξ≥Φ λßÄμ‰ïξ¥ÄλΗΓλßÄλ†êλù‰ λ³Λλ†ïλù¥ ξΑÄκäΞμï€ DJI벧λù‰ Phantom 4 RTKλôÄ D-RKT 2 GNSSκΞΦ μô€λö©μï‰λ‰Äκ΄Λ(Fig. 2).

μï≠ξ≥Β벧λß³λù³ λ¥§λ‰¹μï‰ξ≥† λ†ïμôïκè³κΞΦ μôïκ≥¥μï‰ξΗΑ λ€³μï¥λ³€κäî λßÄλɹ ξΗΑλΛÄλ†êλùΗ Ground Control Point (GCP)λù‰ λûêκΘ¨κΞΦ μô€λö©μï¥λïΦ μï€κ΄Λ. ξΖΗκü§κ²‰, κ≥Η λ½ΑξΒ§λ½êλ³€κäî Phantom 4 RTKλù‰ λßÄμ‰ïλûêκΘ¨ λà‰λ΄†ξΗΑκäΞλù¥ λûàκäî ξΗΑλΔÖλù³ μô€λö©μï‰λ‰Äλ€Φκ©Α GPS ξΗΑκΑ‰ λûêκΘ¨κΞΦ μöçκ™ùμï† λà‰ λûàκäî DJI벧λù‰ D-RTK 2 GNSSλôÄ λ½Ακèôμï‰λ½§ λßÄμ‰ïλûêκΘ¨λù‰ λ†ïμôïκè³κΞΦ μôïκ≥¥μï‰λ‰Äκ΄Λ. μï≠ξ≥Β벧λß³λù‰ λ¥§λ‰¹λù³ λ€³μï€ UAV, λΙ¥κ©îκùΦ, λßÄμ‰ïλΗΓκüâλûΞλΙ‰λ½ê κ¨Äμï€ λ†€λ¦êλùÄ Table 2λôÄ ξΑôκ΄Λ.
Table 2
Specifications of Observation Equipment
3. UAVκΞΦ μô€λö©μï€ κçΑλù¥μ³Α ξΒ§λΕï
3.1 UAVλù‰ λ¥§λ‰¹λù³ λ€³μï€ κΙ³μ•âξ≥³μöç λà‰κΠΫ
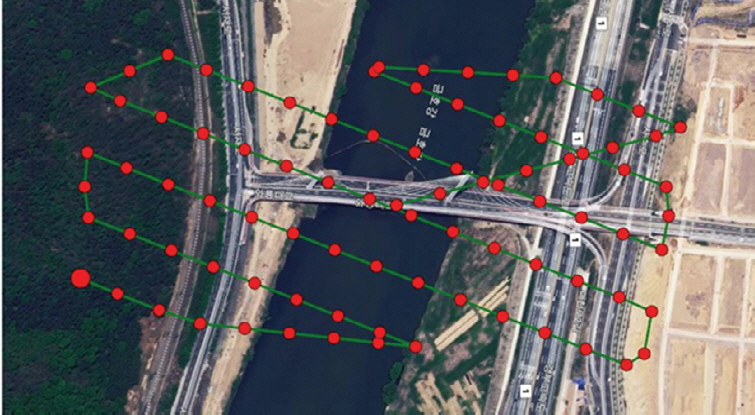
κ≥Η λ½ΑξΒ§λ½êλ³€κäî UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ ξ≥†κ†Λμï€ 3D κΣ®κçΗ ξΒ§λΕïλ½ê κîΑκΞΗ λ†ïκüâλ†¹λùΗ λ‰¹μ•Ξλù³ κΕ³λ³ùμï‰ξ≥†λûê μï€κ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ λ†€λôΗμï€ λ¥§λ‰¹λù‰ λΛëλ≤©κè³, λ¥§λ‰¹ξ≥†κè³, λ¥§λ‰¹κ©¥λ†¹λùÄ κèôλùΦμï€ λΓΑξ±¥λù³ λ³Λλ†ïμï¥λïΦ μï€κ΄Λ. UAV λ¥§λ‰¹λ΄€ ξΗΑλɹμïôλ†¹ λ‰¹μ•ΞλùΗ κΑîκû¨, 뉮κè³, ξΒ§κΠ³ κ™±λù‰ λ‰ΛκΞ‰κΞΦ λ†ÄξΑêμï‰ξΗΑ λ€³μï¥ λΙ¥κ©îκùΦλù‰ ξΑ¹κè³κ≥³κΓ€ 3μö¨λù‰ λ¥§λ‰¹λù³ λà‰μ•âμï‰λ‰Äκ΄Λ. UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³κäî ξ¥ÄλΗΓμï‰κäî λ΄€λ†êλù‰ κ≥ÄμôîκΓ€λ³€ λùΦκΑ‰λ†¹λ€ΦκΓ€ μèâλßÄλù‰ λ‰¹λɹλù³ λ¥§λ‰¹μï‰ξΗΑλ½êκäî 90¬Αλù‰ ξΑ¹κè³κΓ€κè³ κ¨ÄλɹλßÄλ½≠λù‰ λ†ïλ²§λ‰¹λɹλù³ ξ§쉳μï† λà‰ λûàκ΄Λ. ξΖΗκü§κ²‰, ξΒ§λΓΑκ§Φλù‰ ξ≤ΫλöΑ κ΄Λλ•ëμï€ ξΑ¹κè³λ½êλ³€ λ¥§λ‰¹μï‰λ½§λïΦ λô€ξ≥Γ λ½Üλù¥ κ΄Λλ•ëμï€ κΑ©μ•Ξλ½êλ³€ 벧λß³λù³ ξΗΑκΑ‰λ€ΦκΓ€ 3D κΣ®κçΗλù‰ ξΒ§λΕïλù¥ ξΑÄκäΞμï‰κ΄Λ. κ≥Η λ½ΑξΒ§λ½êλ³€κäî λ½ΑξΒ§κ¨ÄλɹλßÄλ½≠λù‰ κΙ³μ•âξ≥³μöçλùÄ λôÄκΘΓκ¨ÄξΒêκΞΦ κΣ®κëê ξ¥ÄλΗΓμï† λà‰ λûàκäî κΙ³μ•âκ©¥λ†¹λù³ λ³Λλ†ïμï‰λ‰Äλ€Φκ©Α UAVλù‰ λ¥§λ‰¹ξΑ¹κè³κ≥³ GRID For 2D maps κΣ®κçΗλù³ μÜΒμï¥ 86 imagesκΞΦ λ¥§λ‰¹μï‰κäî ξ≤Éλù³ ξ≥³μöçμï‰λ‰Äκ΄Λ(Fig. 3).
λôÄκΘΓκ¨ÄξΒêλù‰ UAVλù‰ λ¥§λ‰¹λù³ λ€³μï€ κΙ³μ•âξ≥³μöçλ€ΦκΓ€κäî λΙ¥κ©îκùΦ ξΑ¹κè³κäî 90¬Α, 75¬Α, 60¬ΑκΓ€ 3λΓΑξ±¥, λ¥§λ‰¹ μöüλà‰κäî 3μö¨, κΙ³μ•âκ©¥λ†¹λ½ê κ¨Äμï€ λΛëλ≤©κè³κäî GRID for 2D mapsλ½êλ³€ λΔÖκΑ©μ•Ξξ≥Φ μöΓκΑ©μ•Ξλù³ 80%κΓ€ λ³Λλ†ïμï‰λ‰Äκ΄Λ. λ¥§λ‰¹ξ≥†κè³λù‰ λ³Λλ†ïλùÄ λôÄκΘΓκ¨ÄξΒê ξΒêμÉëλù‰ κÜ£λù¥ 25.5 mκΞΦ μè§μï®μï‰ξ≥† ξΒêμÉë λÉ¹κ΄®κΕÄξΙ¨λßÄ λ¥§λ‰¹λù¥ ξΑÄκäΞμï€ ξ≥†κè³κäî 120 mκΓ€ λ³Λλ†ïμï‰λ‰Äκ΄Λ. UAVλù‰ λ¥§λ‰¹ξ≥†κè³λôÄ λ¥§λ‰¹λù‰ λΛëλ≤©κè³κΞΦ ξ≥†κ†Λμï€ ξ≤Αξ≥Φ λ½ΑξΒ§κ¨ÄλɹλßÄλ½≠λù‰ κ©¥λ†¹λùÄ 0.455 ψéΔκΓ€ λ³Λλ†ïκê‰λ½àκ΄Λ. UAVλù‰ λ¥§λ‰¹λù³ λ€³μï€ κΙ³μ•âξ≥³μöçλù‰ λΓΑξ±¥λùÄ Table 3ξ≥Φ ξΑôκ΄Λ.
3.2 UAVλù‰ λ¥§λ‰¹ξΑ¹κè³κΞΦ ξ≥†κ†Λμï€ DSM ξΒ§λΕï
κ≥Η λ½ΑξΒ§λ½êλ³€κäî UAVκΓ€ λ¥§λ‰¹μï€ μï≠ξ≥Β벧λß³λù‰ λ‰¹λɹλ≤‰κΠ§κΞΦ λ€³μï¥λ³€ Pix4D MapperκΞΦ λù¥λö©μï‰λ‰Äλ€Φκ©Α λ¥§λ‰¹λßÄμë€λûêκΘ¨κΞΦ μô€λö©μï€ DSMξ≥Φ λ†ïλ²§λ‰¹λɹλù³ κΕ³λ³ùμï‰λ‰Äκ΄Λ. λ†ïλ²§λ‰¹λɹλùÄ λ¥ù 4κ΄®ξ≥³λù‰ ξ≥Φλ†ïλù³ μÜΒμï¥ μï≠ξ≥Βλ¥§λ‰¹ 벧λß³κ™Λλù‰ λΛëκ≥ΒλßÄλ½≠λù³ κßΛλΙ≠λ†êλù³ ξ≤Αλ†ïμï‰ξ≥† μè§λùΗμäΗ μ¹¥κùΦλöΑꙀκΞΦ λÉùλ³±μï‰ξ≥† TINλù³ λÉùλ³±μï‰ξ≥† DSMξ≥Φ λ†ïλ²§λ‰¹λɹλù³ 놀λûëμï‰λ‰Äκ΄Λ(Francesco et al., 2013). UAVλù‰ λΔ¨μë€λ†ïκ≥¥κäî λΛëκΕÄλ¦êλ†ê ξΗΑλΛÄλù‰ TM λΔ¨μë€ξ≥³κΓ€ λ³Λλ†ïμï‰λ‰Äλ€Φκ©Α D-RTK 2 GNSSλù‰ λΔ¨μë€λûêκΘ¨κΞΦ λà‰λ΄†μï‰λ½§ λßÄλɹξΗΑλΛÄλ†êλù³ λ³Λλ†ïμï‰λ‰Äκ΄Λ. UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³λù‰ 90¬Α, 75¬Α, 60¬Αλ½ê κ¨Äμï€ λ†ïλ²§λ‰¹λɹξ≥Φ DSMξ≤Αξ≥Φκäî Fig. 4λôÄ ξΑôλù¥ κΕ³λ³ùκê‰λ½àκ΄Λ.
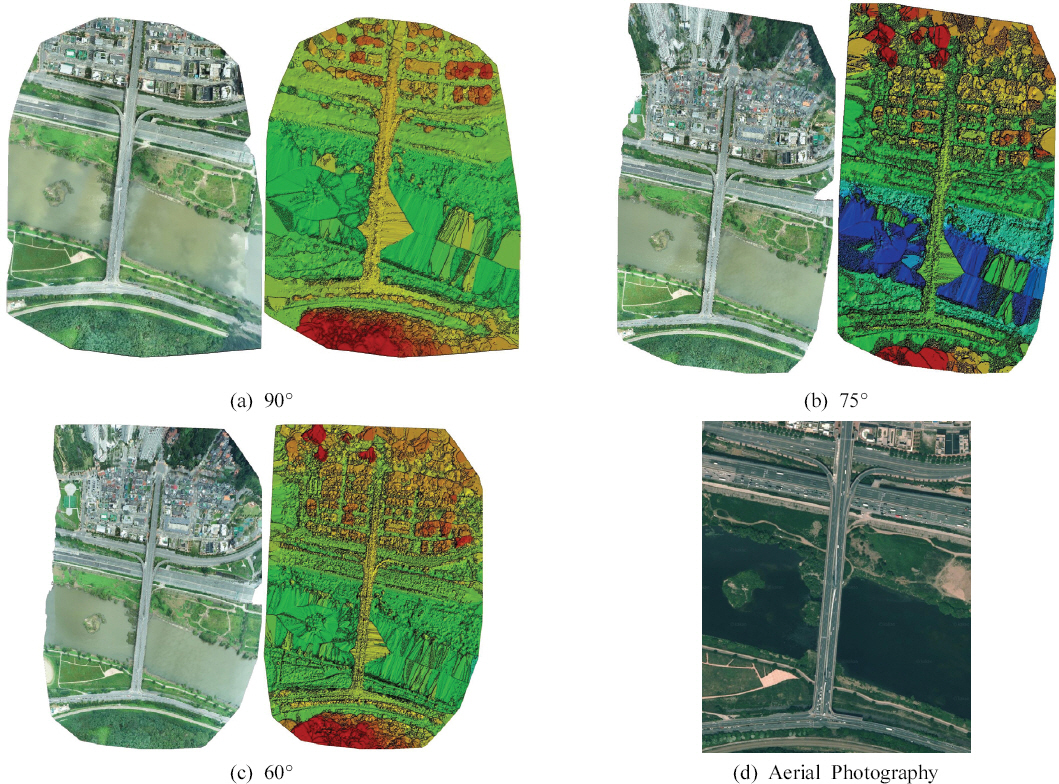
UAVλù‰ λ¥§λ‰¹ ξΑ¹κè³λ½ê κ¨Äμï‰λ½§ μï≠ξ≥Β벧λß³ξ≥Φ λßÄλɹξΗΑλΛÄλ†êλù³ λù¥λö©μï‰λ½§ DSMξ≥Φ λ†ïλ²§λ‰¹λɹλ½ê κ¨Äμï€ μ£àλßà μäΙλ³±λù³ κΕ³λ³ùμï‰λ‰Äκ΄Λ(Table 4). λ¥§λ‰¹κçΑλù¥μ³Αλù‰ μ£àλßàλùÄ UAVλù‰ λ¥§λ‰¹ξΑ¹κè³λ½ê κîΑκùΦ Imagesλù‰ ξΑ€λà‰κäî 90¬ΑλùΦ κï¨ 41,885ξΑ€, 75¬ΑλùΦ κï¨ 43,975ξΑ€, 60¬ΑλùΦ κï¨ 46,285ξΑ€κΓ€λ³€ λ¥§λ‰¹ξΑ¹κè³ξΑÄ 15¬Αλù‰ ξΑêλܨμï†λà‰κΓù Imagesκäî λïΫ 1.05κΑΑλî© λΠùξΑÄμï‰λ‰Äκ΄Λ. ξΑ¹ Imagesκ≥³ Matching ξΑ€λà‰κè³ 90¬ΑλùΦ κï¨ 8,488.08ξΑ€, 75¬ΑλùΦ κï¨ 9,2393.49ξΑ€, 60¬ΑλùΦ κï¨ 13,584.00ξΑ€κΓ€λ³€ λ¥§λ‰¹ξΑ¹κè³ξΑÄ 15¬Αλù‰ ξΑêλܨμï†λà‰κΓù Matching ξΑ€λà‰κäî 90¬Αλ½êλ³€ 75¬Ακäî 1.09κΑΑ, 75¬Αλ½êλ³€ 60¬Ακäî 1.60κΑΑ λΠùξΑÄμï‰λ‰Äκ΄Λ. UAVλù‰ λ¥§λ‰¹ ξΑ¹κè³λ½ê κ¨Äμï€ ξΗΑλɹξΗΑλΛÄλ†êλù‰ RMSEκäî λ¥§λ‰¹ ξ≤Αξ≥Φκ§Φλù‰ μ£àλßàλù³ 겉μÉÄκ²¥κäî λßÄμë€κΓ€λ³€ GNSSλù‰ λΔ¨μë€λûêκΘ¨λôÄ UAVλù‰ λΗΓκüâλΔ¨μë€λôÄλù‰ λ†ïμôïκè³ λΑ®λù¥κΞΦ λ†€λ΄€μï¥λΘΦκäî λßÄμë€κΓ€λ³€ λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ λ‰ΛλΑ®κäî 90¬Ακäî 0.0019 m, 75¬Ακäî 0.0018 m, 60¬Ακäî 0.0022 mξΑÄ κΑ€λÉùμï‰λ½§ λ¥§λ‰¹μï€ κçΑλù¥μ³Αλù‰ λ†ïμôïκè³κΞΦ μôïκ≥¥μï‰λ‰Äκ΄Λ.
Table 4
Quality Characteristics of Photography Data
| Classification | 90¬Α | 75¬Α | 60¬Α |
|---|---|---|---|
| Images | 41,855 | 43,975 | 46,285 |
| Dataset | 86 | 86 | 86 |
| Camera Optimization | 0.5% | 0.5% | 0.5% |
| Matching | 8,488.08 | 9,293.49 | 13,584.00 |
| RMSE | 0.0019 m | 0.0018 m | 0.0022 m |
UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ ImagesκΞΦ ξΒ§λ³±μï‰ξ≥† Matchingκê€ μï≠ξ≥Β벧λß³λùÄ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù λΠùξΑÄμï‰λ‰Äλ€Φκ©Α Table 5λôÄ ξΑôλù¥ λ³ΗκΕÄμäΙλ³±λù¥ κΕ³λ³ùκê‰λ½àκ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κîΑκùΦ UAVκΓ€ λ¥§λ‰¹κê€ μï≠ξ≥Β벧λß³λù³ μï‰κ²‰λù‰ λ†ïλ²§λ‰¹λɹλ€ΦκΓ€ ξΒ§λ³±μï‰λ‰Äλù³ κï¨ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù λΛëκ≥Βκê‰κäî λ‰¹λɹλù‰ λ†ïκ≥¥ξΑÄ λΒ€λܨ, λΒ€κ¨Ä, μèâξΖ† κΣ®κëê λΠùξΑÄμï‰λ‰Äκ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κîΑκΞΗ λ‰¹λɹλù‰ μôîξΑ¹λù¥ κ³™λ•¥λßÄξΗΑ κï¨κ§Ηλ½ê 벧λß³λΗΓκüâλ½êλ³€ κèôλùΦμï€ λΛëλ≤©κè³λ½êκè³ κΕàξΒ§μï‰ξ≥† κçî κßéλùÄ λ‰¹λɹλ†ïκ≥¥ξΑÄ μôïκ≥¥κê‰λ•¥ κΕ³λ³ùκê‰λ½àκ΄Λ.
Table 5
Adjustment Details of Photography Data
4. λà‰κΠ§ξΒ§λΓΑκ§Φλù‰ 3D κΣ®κçΗ λ†¹λö©λ³± μèâξΑÄ
4.1 3D κΣ®κçΗ ξΒ§λΕï κΑè κçΑλù¥μ³Α κΕ³λ³ù
κ¨ÄλɹλßÄλ½≠λù‰ λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ λΓΑλ†àμï‰λ½§ UAVκΓ€ μï≠ξ≥Β벧λß³λù³ λ¥§λ‰¹μï‰ξ≥† DSMξ≥Φ λ†ïλ²§λ‰¹λɹλù³ κΕ³λ³ùμï‰λ½§ λôÄκΘΓκ¨ÄξΒêλù‰ 3D κΣ®κçΗλù³ ξΒ§λΕïμï‰λ‰Äκ΄Λ. λΙ¥κ©îκùΦλù‰ ξΑ¹κè³κ≥³ λôÄκΘΓκ¨ÄξΒêλù‰ 3D κΣ®κçΗλùÄ ξΑÄλ΄€λ†¹λùΗ ξ≤Αξ≥ΦκΕÄμ³Α κΕ³λ³ùξ≤Αξ≥Φλ½ê κîΑκΞΗ λ†ïκüâλ†¹λùΗ λ‰¹μ•ΞξΙ¨λßÄ κ΄Λλ•ëμï€ κΑ©κ≤ïλ€ΦκΓ€ κΕ³λ³ùλù³ μï‰λ‰Äκ΄Λ. Pix4Dλ½êλ³€ ξΒ§λΕïκê€ 3D κΣ®κçΗλù‰ ξΒêκüâλùÄ λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ ξΑÄλ΄€λ†¹λùΗ ξ≤Αξ≥Φλ½êλ³€κè³ λΑ®λù¥ξΑÄ κΑ€λÉùμï‰λ‰Äκ΄Λ(Fig. 5). λΙ¥κ©îκùΦλù‰ ξΑ¹κè³ξΑÄ 90¬Αλ½êλ³€κäî ξΒêμÉëλ½ê λ½Αξ≤Ακê€ λôÄλù¥λ•¥ξΑÄ λôΦλΣΫξ≥Φ λ‰ΛκΞΗλΣΫ κΣ®κëê 3D κΣ®κçΗκΓ€ ξΒ§λ³±κê‰λßÄ κΣΜμï‰λ‰Äλ€Φκ©Α ξΒêκüâ λΑ®κè³λ½êλ³€κè³ κùΦλùΗλûëλ½Öλù¥ 볆κΣÖμï‰ξ≤¨ ξΒ§λΕïκê‰λßÄ λïäλï‰κ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ 75¬Αλ½êλ³€κäî 90¬Ακ≥¥κ΄Λκäî ξΒêμÉëλù³ λΛë봧λ€ΦκΓ€ λôÄλù¥λ•¥κäî κΙ³λäΖμï‰ξ≤¨ ξΒ§λ³±κê‰λ½àλ€Φ겉 ξΒêκüâ λΑ®κè³κΕÄκΕ³λù¥ κ≥¥κ΄Λ 볆κΣÖμï‰ξ≤¨ ξΒ§λΕïκê‰λ½àκ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³ 60¬Αλ½êλ³€κäî ξΒêμÉëλù‰ λôÄλù¥λ•¥κΞΦ μôïλùΗμï† λà‰ λûàλ€Φκ©Α ξΒêκüâ λΑ®κè³κΕÄκΕ³κè³ κùΦλùΗλù¥ 볆κΣÖμï‰ξ≤¨ ξΒ§λΕïκê€ ξ≤Éλù³ μôïλùΗμï† λà‰ λûàλ½àκ΄Λ. κ§ΦκΓ† UAVκΞΦ λù¥λö©μï€ μï≠ξ≥Β벧λß³ λ¥§λ‰¹λ€ΦκΓ€ ξΒêκüâλù‰ μï‰κ΄®κΕÄ ξΒêξΑ¹κΕÄκΕ³λùÄ κӮꙆ λΙ¥κ©îκùΦ ξΑ¹κè³λ½êλ³€ κΣ®κçΗλù¥ ξΒ§λΕïκê‰λßÄ λïäλï‰κ΄Λ.
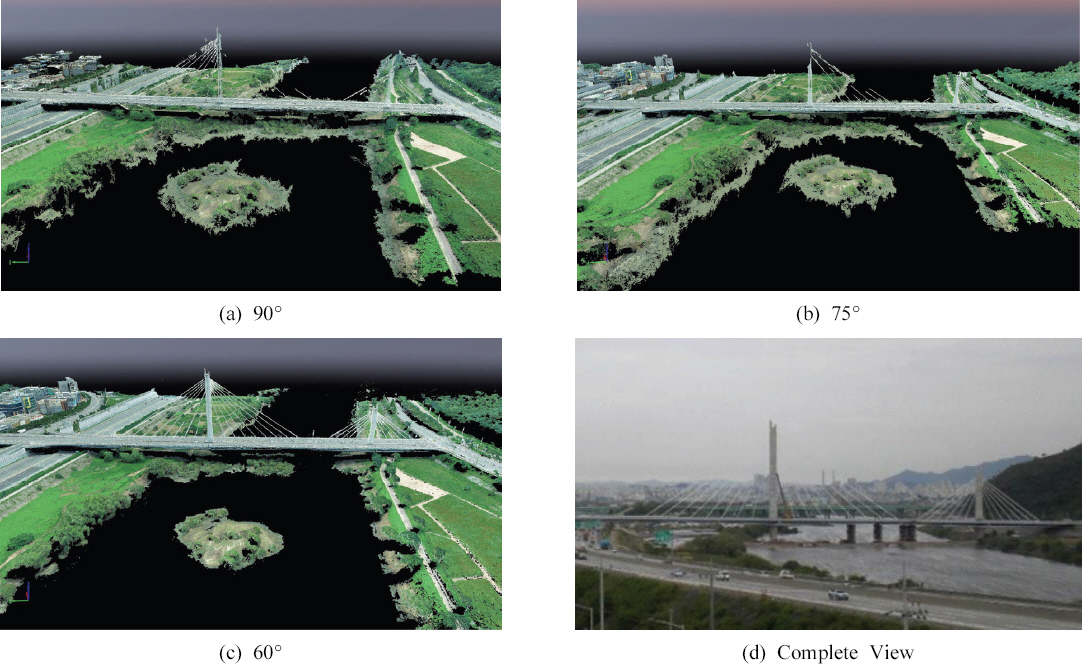
λôÄκΘΓκ¨ÄξΒêλù‰ 3D κΣ®κçΗλùÄ ξ¥ÄλΗΓκê€ μï≠ξ≥Β벧λß³λ€ΦκΓ€ ξΒ§λΕïκê€ DSMξ≥Φ λ†ïλ²§λ‰¹λɹλù¥ μô€λö©κê‰κ©Α 2D κΣ®κçΗλ½êλ³€ ξ¥ÄλΗΓκê€ λûêκΘ¨λù‰ μë€ξ≥†λ†ïκ≥¥κΞΦ λΕîξΑÄμï‰λ½§ 3D κΣ®κçΗλù‰ μè§λùΗμäΗκΞΦ κΕ³λ³ùμï€κ΄Λ(Table 6). κΕ³λ³ùκê€ 3D κΣ®κçΗλù‰ μè§λùΗμäΗκΞΦ ξ≤Αμï©μï‰λ½§ μî³κΓ€ξΖΗκû®λ½êλ³€ λôÄκΘΓκ¨ÄξΒêκΞΦ ξΒ§λΕïμï‰ξ≤¨ κê€κ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ λôÄκΘΓκ¨ÄξΒêλù‰ 2D ξ≤©λûêλù‰ κΕ³λ³ù λà‰κäî 90¬ΑκΞΦ ξΗΑλΛÄλ€ΦκΓ€ 75¬ΑξΑÄ 1.22κΑΑ, 60¬Ακäî 1.78κΑΑκΓ€ 2D κΣ®κçΗ ξΒ§λΕïλù³ λ€³μï€ ξ¥ÄλΗΓλûêκΘ¨ξΑÄ λΠùξΑÄμï‰λ‰Äκ΄Λ. κ‰êμï€ 3D κΣ®κçΗ μè§λùΗμäΗλù‰ ξ≤ΫλöΑκè³ λΙ¥κ©îξΑÄ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù 90¬ΑκΞΦ ξΗΑλΛÄλ€ΦκΓ€ 75¬ΑξΑÄ 1.17κΑΑ, 60¬Ακäî 1.47κΑΑκΓ€ κΕ³λ³ù μè§λùΗμäΗξΑÄ λΠùξΑÄμï‰λ‰Äκ΄Λ. ξΖΗκü§κ²‰, λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù 3D κΣ®κçΗ ξΒ§λΕïλ½ê κîΑκΞΗ 1 pixelsκ΄Ι λ‰ΛκΞ‰κäî 90¬ΑκΞΦ ξΗΑλΛÄλ€ΦκΓ€ 75¬ΑξΑÄ 1.02κΑΑ, 60¬Ακäî 1.05κΑΑκΓ€ μ¹Α λΑ®λù¥κäî κΑ€λÉùμï‰λßÄ λïäλï‰κ΄Λ. κîΑκùΦλ³€, μï≠ξ≥Β벧λß³λù³ λù¥λö©μï€ 3λΑ®λ¦ê κΣ®κçΗ ξΒ§λΕïλù³ λ€³μï¥λ³€κäî λ†ïλ²§λ‰¹λɹλù¥κ²‰ 2D μè§λùΗμäΗκΞΦ κßéλù¥ μôïκ≥¥μï† λà‰ λûàξ≤¨ λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ λΓΑλ†àμï‰λ½§ κßéλùÄ λ†ïκ≥¥κΞΦ μôïκ≥¥μï€κ΄Λκ©¥ λ†ïκΑÄμï€ λûêκΘ¨κΞΦ ξΒ§λΕïμï† λà‰ λûàκäî ξ≤Éλ€ΦκΓ€ κΕ³λ³ùκê‰λ½àκ΄Λ.
Table 6
Detailed Adjustment for 3D Model Building by Camera Angle
4.2 λ¥§λ‰¹ξΑ¹κè³κΞΦ ξ≥†κ†Λμï€ λà‰κΠ§ξΒ§λΓΑκ§Φ κΣ®κçΗλù‰ λ†ïμôïκè³ μèâξΑÄ
κ≥Η λ½ΑξΒ§λ½êλ³€κäî λßÄλɹξΗΑλΛÄλ†êλù‰ λ€³λΙ‰λ†ïκ≥¥ λà‰λßëλù¥ ξΑÄκäΞμï€ UAVκΞΦ μô€λö©μï‰λ½§ κ΄Λλ•ëμï€ λΙ¥κ©îκùΦ ξΑ¹κè³κΓ€ λôÄκΘΓκ¨ÄκΘ¨κΞΦ λ¥§λ‰¹μï‰λ‰Äλ€Φκ©Α XκΑ©μ•Ξ, YκΑ©μ•Ξ, ZκΑ©μ•Ξλ½ê κ¨Äμï€ λßÄκΠ§λ€³λΙ‰λù‰ λ†ïμôïκè³κΞΦ κΕ³λ³ùμï‰λ‰Äκ΄Λ(Table 7). κΕ³λ³ùκê€ XκΑ©μ•Ξ, YκΑ©μ•Ξ, ZκΑ©μ•Ξλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κ¨Äμï€ λßÄκΠ§λ€³λΙ‰λù‰ λ‰ΛλΑ®κäî 95.35%~100%κΓ€ 95.35% λù¥λɹλù‰ λ€³λΙ‰λ†ïκ≥¥ξΑÄ κΕ³λ³ùκê‰λ•¥ μ½àλö© λ‰ΛλΑ®κ²¥κΓ€ λ†ïμôïκè³ κÜ£λùÄ λù¥κ·ΗλßÄξΑÄ λ¥§λ‰¹κê‰λ½àκ΄Λ. λßÄκΠ§λ€³λΙ‰λù‰ μèâξΖ† λ†ïμôïκè³κäî λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³κΓ€ 90¬ΑξΑÄ 0.0415 m, 75¬ΑξΑÄ 0.0462 m, 60¬ΑξΑÄ 0.470 mκΓ€ λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ 0.5 cm κ·Ηκߨλù‰ λ‰ΛλΑ®ξΑÄ κΑ€λÉùμï‰λ‰Äκ΄Λ. λßÄκΠ§λ€³λΙ‰λ½ê κ¨Äμï€ κΕ³λ²ΑλùÄ κӮꙆ λΙ¥κ©îκùΦ ξΑ¹κè³λ½êλ³€ 1.0 cm κ·Ηκߨλù¥ κΑ€λÉùμï‰λ‰Äλ€Φκ©Α λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ ξΑÄλûΞ λûëλùÄ 60¬Αλ½êλ³€ ξΑÄλûΞ κÜ£λùÄ κΕ³λ²Αλù¥ κΕ³λ³ùκê‰λ½àκ΄Λ. λßÄκΠ§λ€³λΙ‰λ½ê κ¨Äμï€ λΙ¥κ©îκùΦ ξΑ¹κè³λù‰ λ†ïμôïκè³κäî XκΑ©μ•Ξ, YκΑ©μ•Ξκ≥¥κ΄Λκäî ZκΑ©μ•Ξλ½êλ³€ κ¨ÄκΕÄκΕ³λù‰ λ‰ΛλΑ®ξΑÄ κΑ€λÉùμï€ ξ≤Éλ€ΦκΓ€ μôïλùΗκê‰λ½àκ΄Λ.
Table 7
Accuracy Analysis by Geolocation
λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ ξ≥†κΑÄκè³λù‰ μè§λùΗμäΗ μ¹¥κùΦλöΑꙀ, DSM, λ†ïλ²§λ‰¹λɹλùÄ 3D κΣ®κçΗλù‰ ξΒ§λΕïλù³ λ€³μï€ λ†ïλ²§λ‰¹λɹλù‰ λΛëλ≤©ξ≤Αξ≥ΦλôÄκäî λɹκΑ‰κê€ κΕ³λ³ùξ≤Αξ≥ΦξΑÄ λ†€λ΄€κê‰λ½àκ΄Λ(Table 8). λΙ¥κ©îκùΦλù‰ ξΑ¹κè³ξΑÄ ξΑêλܨκê†λà‰κΓù μï€ λûΞλù‰ λ†ï벧벧λß³λ½ê μè§μï®κê† λà‰ λûàκäî 벧λß³κ©¥λ†¹λù¥ λΠùξΑÄμï‰κäî κΑ‰κ©¥λ½ê ξ≥†κΑÄκè³ λ‰¹λɹλûêκΘ¨κΞΦ ξΒ§λ³±μï‰κäî μè§λùΗμäΗ μ¹¥κùΦλöΑꙀκäî ξΑêλܨμï‰λ‰Äκ΄Λ. 3D ξ≥†κΑÄκè³ μè§λùΗμäΗκäî 90¬ΑκΞΦ ξΗΑλΛÄλ€ΦκΓ€ 75¬ΑξΑÄ 0.98κΑΑ, 60¬Ακäî 0.84κΑΑκΓ€ ξΑêλܨμï‰λ‰Äλ€Φκ©Α 1 m¬≥κ΄Ι 90¬Ακäî 17.09, 75¬Ακäî 12.76, 60¬Ακäî 9.65λù¥ κΕ³λ³ùκê‰λ½àκ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ 1 pixelλù‰ λ†ïλ²§λ‰¹λɹλù‰ μ¹§ξΗΑκäî 90¬ΑξΑÄ 5.26 cm/pixel, 75¬ΑξΑÄ 5.80 cm/pixel, 60¬ΑξΑÄ 7.06 cm/pixelλù‰ μï¥λɹκè³ξΑÄ κΕ³λ³ùκê‰λ½àκ΄Λ. κîΑκùΦλ³€, λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κ¨Äμï€ DSMξ≥Φ λ†ïλ²§λ‰¹λɹλùÄ λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù λΛëκ≥Βκê‰κäî μè§λùΗμäΗ μ¹¥κùΦλöΑꙀξΑÄ κßéλï³ 3D κΣ®κçΗ ξΒ§λΕïλùÄ κßéλùÄ λ€³λΙ‰λ†ïκ≥¥κΞΦ κ΄¥λù³ λà‰ λûàλßÄκߨ ξ≤Αξ≥Φκ§Φλù‰ κΑÄκè³ κΑè λ†ïμôïκè³ λΗΓκ©¥λ½êλ³€κäî λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ 90¬Α ~ 60¬ΑκΓ€ ξΑêλܨκê†λà‰κΓù ξΑêλܨμï‰κäî ξ≤Éλ€ΦκΓ€ κΕ³λ³ùκê‰λ½àκ΄Λ.
5. ξ≤Α κΓ†
κ≥Η λ½ΑξΒ§λ½êλ³€κäî 4λΑ® λ²Αλ½Öμ‰¹κΣÖλù‰ λΘΦλöîξΗΑλà† λΛëλ½ê μï‰κ²‰λùΗ UAVκΞΦ μô€λö©μï‰λ½§ λà‰κΠ§ξΒ§λΓΑκ§Φλù‰ 3D κΣ®κçΗλù³ ξΒ§λΕïμï‰ξ≥† λΙ¥κ©îκùΦ ξΑ¹κè³λ½ê κîΑκΞΗ λ†ïκüâλ†¹λùΗ λ‰¹μ•Ξλù³ μèâξΑÄμï‰λ‰Äκ΄Λ. κ¨ÄλɹλßÄλ½≠λùÄ κ¨ÄξΒ§ξ¥ëλ½≠λ΄€ 괧볱ξΒΑλ½ê λ€³λΙ‰μï€ λà‰κΠ§ξΒ§λΓΑκ§ΦκΓ€λ³€ 벧λûΞξΒê μ‰ïλ΄ùλù‰ ξΒêκüâλù¥κ©Α ξΗΗλù¥κäî 477 m, 뀆μö®μè≠λùÄ 25.5 mλù¥κ΄Λ. UAVκäî Phantom4 RTKκΞΦ λ²§λö©μï‰λ‰Äλ€Φκ©Α λßÄμ‰ïλûêκΘ¨λù‰ λ†ïμôïκè³κΞΦ λ€³μï¥ D-RKT 2 GNSSκΞΦ λ³ΛλΙ‰μï‰λ½§ 10 cm κ·Ηκߨλù‰ λ‰ΛλΑ®κ≤îλ€³κΓ€ κçΑλù¥μ³Αλù‰ λ†ïμôïκè³κΞΦ μôïκ≥¥μï‰λ‰Äκ΄Λ.
UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³κäî 90¬Α, 75¬Α, 60¬Αλ½ê κ¨Äμï‰λ½§ ξ¥ÄλΗΓλù³ λ΄Λλ΄€μï‰λ‰Äλ€Φκ©Α κΙ³μ•âξ≥†κè³, κΙ³μ•âκ©¥λ†¹, λΛëλ≤©κè³, λ¥§λ‰¹λ²§λß³ κ™±λù‰ λΓΑξ±¥λùÄ κΣ®κëê κèôλùΦμï‰ξ≤¨ λ†¹λö©μï‰λ‰Äκ΄Λ. UAVκΓ€ λ¥§λ‰¹μï€ μï≠ξ≥Β벧λß³λù‰ XκΑ©μ•Ξ, YκΑ©μ•Ξ, ZκΑ©μ•Ξλù‰ μè§λùΗμäΗ μ¹¥κùΦλöΑꙀκΞΦ λΕîλΕ€μï‰λ½§ DSMξ≥Φ λ†ïλ²§λ‰¹λɹλù³ κΕ³λ³ùμï‰λ‰Äκ΄Λ. λΙ¥κ©îκùΦ ξΑ¹κè³κ≥³ ImagesλôÄ MatchingλùÄ λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ λûëλù³λà‰κΓù κßéλùÄ κ©¥λ†¹λù¥ λ¥§λ‰¹κê‰λ•¥ λΠùξΑÄμï‰κäî ξ≤Éλ€ΦκΓ€ κΕ³λ³ùκê‰λ½àκ΄Λ. μï≠ξ≥Β벧λß³λù³ μÜΒμï€ mappingλù‰ κΕ³λ³ùξ≤Αξ≥Φκäî Imagesκäî 15¬Α ξΑ¹κè³ξΑÄ ξΑêλܨμï† κï¨ 1.05κΑΑξΑÄ MatchingλùÄ 90¬Α κ¨ÄκΙ³ 75¬Ακäî 1.09κΑΑ, 60¬Ακäî 1.60κΑΑ λΠùξΑÄμï‰λ‰Äκ΄Λ. λôÄκΘΓκ¨ÄξΒêλù‰ 3D κΣ®κçΗλùÄ λΙ¥κ©îκùΦλù‰ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù ξ¥ÄλΗΓλûêκΘ¨λ½ê κ¨Äμï€ 3D κΣ®κçΗ μè§λùΗμäΗξΑÄ 90¬Α κ¨ÄκΙ³ 75¬Ακäî 1.17κΑΑ, 60¬Ακäî 1.47κΑΑ λΠùξΑÄμï‰λ‰Äλ€Φκ©Α XκΑ©μ•Ξ, YκΑ©μ•Ξ, ZκΑ©μ•Ξλ½ê κ¨Äμï€ λßÄκΠ§λ€³λΙ‰λù‰ λ‰ΛλΑ®κäî 5 cm λù¥μï‰κΓ€ λ†ïμôïκè³κΞΦ μôïκ≥¥μï‰λ‰Äκ΄Λ.
μï≠ξ≥Β벧λß³λ€ΦκΓ€ κΕ³λ³ùκê€ DSMξ≥Φ λ†ïλ²§λ‰¹λɹ, 3D κΣ®κçΗλù‰ μè§λùΗμäΗ μ¹¥κùΦλöΑꙀλù‰ κΑÄλßëκè³κäî UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù ξΑêλܨμï‰κäî ξ≤Éλ€ΦκΓ€ κΕ³λ³ùκê‰λ½àκ΄Λ. DSMξ≥Φ λ†ïλ²§λ‰¹λɹλùÄ 90¬ΑλùΗ 5.26 cm/pixelλù³ ξΗΑλΛÄλ€ΦκΓ€ 75¬ΑξΑÄ 1.10κΑΑ, 60¬ΑξΑÄ 1.34κΑΑ λΠùξΑÄμï‰λ‰Äλ€Φκ©Α 3D κΣ®κçΗλùÄ 90¬ΑλùΗ 17.09 m¬≥κΞΦ ξΗΑλΛÄλ€ΦκΓ€ 0.75κΑΑ, 60¬Α 0.56κΑΑ ξΑêλܨμï‰λ‰Äκ΄Λ. κîΑκùΦλ³€, λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù μï≠ξ≥Β벧λß³λ½ê κ¨Äμï€ λ†ïμôïκè³κäî ξΑêλܨμï‰κäî ξ≤Éλ€ΦκΓ€ κΕ³λ³ùκê‰λ½àκ΄Λ. κ≥Η λ½ΑξΒ§λ½êλ³€κäî UAVκΞΦ μô€λö©μï‰λ½§ κ¨ÄξΒ§ξ¥ëλ½≠λ΄€λ½ê λ€³λΙ‰μï€ ξΒêκüâλù‰ μï≠ξ≥Β벧λß³λùÄ λΗΓκüâμï‰λ‰Äλ€Φκ©Α DSMξ≥Φ λ†ïλ²§λ‰¹λɹ, 3D κΣ®κçΗλù³ ξΒ§λΕïμï‰λ‰Äκ΄Λ. λΙ¥κ©îκùΦλù‰ ξΑ¹κè³ξΑÄ ξΑêλܨμï†λà‰κΓù μï≠ξ≥Β벧λß³λù‰ λΛëλ≤©κè³ξΑÄ λΠùξΑÄμï‰λ½§ ξΒ§λΓΑκ§Φλù‰ 3D κΣ®κçΗ ξΒ§λΕïλù‰ λ†ïμôïκè³κäî λΠùξΑÄμï‰λ‰Äκ΄Λ. ξΖΗκü§κ²‰, μè§λùΗμäΗ μ¹¥κùΦλöΑꙀλ½ê κ¨Äμï€ κΑÄκè³κäî κ²°λï³λ†Ηλ³€ λ†ïκΑÄκè³κäî UAVλù‰ λΙ¥κ©îκùΦ ξΑ¹κè³ξΑÄ λûëλù³λà‰κΓù ξΑêλܨμï‰κäî ξ≤Éλ€ΦκΓ€ κΕ³λ³ùκê‰λ½àκ΄Λ. UAVκΞΦ λù¥λö©μï€ ξΒ§λΓΑκ§Φλù‰ 3D κΣ®κçΗ ξΒ§λΕïλùÄ κΣ©λ†¹λ½ê κîΑκΞΗ λ†ïκΑÄκè³ μôïκ≥¥κΞΦ λ€³μï¥ κ΄Λλ•ëμï€ λΙ¥κ©îκùΦ ξΑ¹κè³κΞΦ λΓΑλ†ïμï‰λ½§ λ³±ξ≥ΦκΞΦ ξΒ§λΕïμï† λà‰ λûàκè³κΓù κΙ³μ•âξ≥³μöçλù³ λà‰κΠΫμï¥λïΦ μï€κ΄Λ.
λΒ€ξΖΦ UAVκäî κ΄Λλ•ëμï€ λ‰¹λ½≠λ½êλ³€ μô€λö©κê‰ξ≥† λûàλ€Φκ©Α κΑ©λû§κΕ³λïΦλ½êλ³€κäî ξΑ€κΑ€λ²§λ½Öλ½ê κ¨Äμï€ λû§μï¥λ‰¹μ•Ξλù³ μèâξΑÄμï‰κäî βĉλû§μï¥λ‰¹μ•ΞμèâξΑÄκ™±λù‰ μ‰ëλù‰ λ΄ΛꧥλßÄλΙ®(2021, μ•âλ†ïλïà놳κΕÄ)βÄôλ½êλ³€ UAVκΞΦ μô€λö©μï‰λ½§ 벧λ½ÖλßÄξΒ§λ½ê 놳κΑïλ†¹λùΗ λû§μï¥λ‰¹μ•Ξλù³ ξ≤Äμ܆μï‰κè³κΓù ξΑ€λ†ïκê‰λ½àκ΄Λ. κ‰êμï€, κ·Ηλ³Ηκ®ΦλßÄ ξ¥ÄλΗΓ, μÉùκΑΑ, ξ¥ÄλΗΓ, λà‰λÉâ κ™±λ½êλ³€ UAVλù‰ κè³λûÖλù³ μÜΒμï¥ μô€λö©λ³±λù¥ λ†êλ†ê μôïκ¨Äκê‰ξ≥† λûàλ•¥ λ†ïκüâλ†¹λùΗ λ†ïμôïκè³κΞΦ μôïκ≥¥μï† λà‰ λûàκäî κ΄Λλ•ëμï€ λ½ΑξΒ§ξΑÄ μï³λöîμï€ λ΄Λλ†ïλù¥κ΄Λ. μ•Ξ즳 λ½ΑξΒ§κΓ€κäî UAVκΞΦ λù¥λö©μï€ λΗΓκüâλù³ μÜΒμï€ 2Dλù‰ λ³Λξ≥³κè³λôÄ 3D κΣ®κçΗλù³ ξΒ§λΕïμï‰λ½§ ξΗΑλΓ¥ λ³Λξ≥³κè³λôÄ BIM, κîîλßÄμ³Η μäΗλ€à κ™±λù‰ λ³Λξ≥³λù‰ λ†¹λö©λ³± κΑè λ†ïμôïκè³κΞΦ λ½ΑξΒ§μï‰ξ≥†λûê μï€κ΄Λ.




