단일편파레이더의 레이더 강우 정확도 향상을 위한 반사도 오차 정량화
Quantification of Error in Reflectivity for Improving the Accuracy of the Radar Rainfall Estimated from Single Polarization Radar
Article information
Abstract
레이더 강우 자료는 시공간적으로 높은 해상도 자료를 제공한다는 장점에도 불구하고 그 정확도에 대한 의구심으로 국내 수문분야 적용에 많은 한계가 있어 왔다. 이와 같은 정확도의 문제점을 극복하기 위해 실시간 ZR 매개변수 산정 방법 및 우량계 강우를 이용한 정량적 보정 방법이 도입되어 왔다. 그러나 이미 레이더 반사도에 오차가 크게 내재된 상황에서 변환된 레이더 강우는 그 어떠한 방법으로 보정되어도 여전히 많은 문제점이 있을 수밖에 없었다. 본 연구에서는 지난 10년 동안 국내에서 제기되어 온 레이더 강우의 정확도 문제점에 대한 해결책을 제시하기 위해 레이더 반사도에 내재되어 있는 오차를 정량화 하였다. 그 결과는 다음과 같다. 먼저 레이더 반사도의 오차분산을 0으로 가정한 경우 레이더 반사도의 편의는 –1 dBZ에서 –14 dBZ로 나타났다. 그러나 오차분산을 고려한 경우 레이더 반사도의 편의는 –3 dBZ에서 –15 dBZ까지 나타났으며, 그 오차분산은 22∼82 dBZ2 사이의 범위로 나타났다.
Trans Abstract
There have been many limitations in the application of the hydrological field in Korea due to doubts about its accuracy, although radar-estimated rainfall has the advantage of providing high temporal and spatial resolution data. Real time ZR parameter calculation methods and many quantitative correction methods using rain gauge rainfall have been introduced to overcome the problem of accuracy. However, the accuracy of the radar rainfall after correction by these methods was a little better than before because the radar rainfall converted by the radar reflectivity had serious errors. In this study, we quantified the errors inherent in the radar reflectivity to solve the problem of accuracy of radar rainfall which has been raised in Korea over the last 10 years. The results are as follows. In the case assuming that the error variance of the radar reflectivity was 0, the bias of radar reflectivity ranged from –1 dBZ to –14 dBZ. In the case considering error variance, the bias of the radar reflectivity ranged from –3 dBZ to –15 dBZ, and the error variance ranged from 22 to 82 dBZ2.
1. 서 론
대기수상체에 대한 기상레이더의 관측 과정에서는 많은 정보들이 손실되고 예측 가능하거나 불가능한 오차가 발생하기 때문에 레이더 관측 자료에는 다양한 오차들이 나타나고 있다(Krajewski and Smith, 2002). 그리고 이러한 오차들은 기상레이더와 관련한 다양한 분야의 전문가들에 따라 다양한 시각으로 나타나고 있다. 전자 및 통신 분야에서는 주로 레이더 하드웨어 검보정에서 나타나는 오차나 신호처리 과정에서의 오차를 주요 오차들로 바라보고 있다(Atlas, 2002). 이에 비해 기상 분야에서는 호우의 종류에 따른 강우 크기 입자분포의 변동성과 레이더 강수 추정 알고리즘의 매개변수 등을 주요 오차 원인으로 바라보고 있다(Gosset et al., 2010). 이러한 전자, 통신, 기상 분야에서의 오차 원인을 파악하고 제거하였다 할지라도 레이더 강우를 수문분석에 활용하는 수문 전문가들에게는 여전히 레이더 강우에 오차가 존재한다는 문제점을 제기하여 왔다(Seo and Krajewski, 2011; Yoon, Choi, et al., 2016; Yoon et al., 2017).
레이더 강우에 오차가 존재한다는 문제점은 국내에 2006년부터 도입되었던 기상레이더(S밴드 단일편파레이더)에서도 마찬가지로 나타나고 있었다. 특히 국내 기상레이더는 그 레이더 강우의 편의가 심각하게 나타나 레이더 강우는 우량계 강우에 비해 정량적으로 30% 수준에 불과하였다(Yoo et al., 2013; Yoon, Choi, et al., 2016). 이러한 레이더 강우의 과소한 문제점을 해결하기 위해 국내 기상학자들은 ZR 관계식(R=AZb)의 매개변수(A와 b)를 실시간으로 추정하는 방법들을 적용하여 왔다(MRI, 2004; Suk et al., 2005; Kim and Yoo, 2014). 이에 비해 지상에 떨어진 강우의 양을 중요시하게 여겼던 국내 수문학자들은 레이더 강우를 정량적으로 우량계 강우와 비슷하게 맞추는 통계적 방법들을 적용하였다. G/R 비를 레이더 강우에 곱하는 방법(Yoo et al., 2013), Co-Kriging (Krajewski, 1987; Seo et al., 1990) 및 SCM (Kim et al., 2008) 등이 대표적인 예이다.
수문 전문가들이 주로 사용하여 왔던 레이더 강우를 우량계 강우와 유사하게 만드는 통계적인 기법들은 그러나 다음과 같은 문제점이 존재한다. 레이더 강우는 레이더 편파변수를 비선형 관계식, 예를 들어 ZR 관계식에 입력하여 추정되는 것이기에 레이더 편파변수에 오차가 내재되어 있다면 레이더 강우에 비선형적으로 전파되고 이러한 비선형적으로 전파된 오차를 내재한 레이더 강우를 통계적인 기법으로 보정하게 되면 그 오차는 더욱 증폭될 가능성이 크다. 일례로 국내에서 쉽게 적용되어 왔던 G/R 비를 레이더강우에 곱하는 방법은 레이더 강우를 정량적으로 우량계 강우와 유사하게 만들 수는 있으나 오차의 변동성을 높이고 상관성을 감소시키는 방법이었다(Yoo et al., 2013; Yoo et al., 2016; Yoon, Choi, et al., 2016).
국내 기상 및 수문학자들은 S밴드 이중편파레이더가 도입되면 이러한 레이더 강우의 편의가 제거 될 것이라 생각하였다. 이에 국토교통부 한강홍수통제소에서 도입된 비슬산레이더가 최초의 S밴드 이중편파레이더로 2009년에 도입된 이후 이중편파레이더가 도입되게 된다. 그러나 S-밴드 이중편파레이더에서 제공되는 편파변수로 추정된 레이더강우의 정확도는 편파변수에 대한 조절 없이는 단일편파레이더와 비슷한 수준으로 나타났다(Yoon, Suk, et al., 2016). 이에 Yoon, Suk, et al. (2016)의 연구에서는 WRC (2015)에서 개발한 Z-ZDR 관계와 Z-KDP 관계를 이용하여 Z, ZDR, KDP를 동시에 조절하여 레이더강수량의 품질을 향상시켰다. 그 결과 70% 이상의 레이더 강우의 정확도(1-NE)를 확보하였다.
Yoon, Suk, et al. (2016) 연구에서 주목할 것은 반사도의 편의를 제거해야 70% 이상의 정확도를 확보할 수 있다는 점이었다. 심지어 반사도만을 이용하여 추정된 레이더 강우 역시도 반사도의 편의를 제거해주면 70% 이상의 정확도를 확보할 수 있었다. 이는 국내 레이더에서 제공되고 있는 레이더 반사도에 매우 큰 오차가 내재되어 있음을 의미한다. 즉, 레이더 강우의 편의는 레이더 반사도의 오차에 기인해 왔었던 것이다. 사실 국내 기상레이더로부터 제공되어 오던 레이더 반사도 오차는 Park and Lee (2010)에서 최초로 제시하였다. Park and Lee (2010)는 지상의 관측 기기로부터 추정된 DSD를 이용하여 한 기상레이더를 보정하고 그 보정된 기상레이더를 이용하여 전국 기상레이더의 반사도 보정값을 제시한바 있다. 그 결과 전국 기상레이더의 반사도는 작게는 -3 dBZ에서 크게는 -12 dBZ 정도의 오차가 발생하는 것으로 밝혀졌다.
본 연구에서는 지난 10년 동안 국내에서 제기되어 온 레이더 강우 추정량의 과소한 문제점에 대한 해결책을 제시하기 위해 레이더 반사도에 내재되어 있는 오차를 정량화하였다. 이를 위해 Yoon (2013)에서 이론적으로 유도된 레이더 반사도 편의 식과 Yoon, Suk, et al. (2016)의 경험적 방법을 이용하여 레이더 반사도의 오차를 추정하였다.
2. 이 론
2.1 레이더 강우의 오차
레이더 반사도 자료 산출 과정에는 다양한 오차가 포함될 수 있으며, 이러한 오차는 레이더 강우에 직접적인 영향을 미칠 수 있다. 레이더 반사도의 오차는 보통 다음과 같이 정의될 수 있다(Koistinen et al., 2004).
여기서, ∈(X, h)는 거리 r과 방위각 θ로 정의되는 위치 X와 고도 h에서의 오차를 의미하고 단위는 dBZ이다. Z(X, h)와 z(X, h)는 (X, h) 지점에서의 반사도를 의미하며 각각 mm6/m3과 dBZ의 단위를 갖는다. ZT(X, h)와 zT(X, h)는 참값의 반사도를 나타낸다.
반사도 z의 평균은 Eq. (1)로부터 참값의 반사도 zT의 평균과 오차 ∈의 평균의 합으로 정의될 수 있다. zT는 참값이기 때문에 그 자체가 평균의 값과 같으며 오차 ∈의 평균은 편의 μz로 정의하였다. 따라서 반사도 z의 평균은 zT+μz가 된다. 반사도 z의 분산 역시도 참값의 반사도 zT의 분산과 오차 ∈의 분산의 합으로 정의 될 수 있다. 물론 참값의 반사도 zT의 분산은 0이기 때문에 반사도 z의 분산은 결국 오차 ∈의 분산과 같다. 오차 ∈의 분산은
Yoon (2013)에서는 정규분포를 따르는 것으로 가정된 레이더 반사도에 편의 μz와 오차분산
또한 Yoon (2013)에서는 비율(ratio)로 표현되는 레이더 강우 R의 편의를 다음과 같이 유도하였다.
Eq. (4)를 살펴보면, 비율로 표현되는 R의 편의 B는 반사도의 편의 μz, 오차분산
2.2 경험적 방법을 이용한 레이더 반사도 편의 추정
Yoon, Suk, et al. (2016)에서 제시한 경험적 방법은 WRC (2015)에서 제시한 Z-ZDR 및 Z-KDP 관계를 이용하여 레이더 변수를 조절 후 레이더 강수량의 정확도를 향상시킨 방법이다. 본 방법의 과정은 다음과 같다. 먼저, 우량계 지점과 동일한 레이더 지점에서의 호우사례 전체 시간에 대한 Z-ZDR의 이변량 분포와 Z-KDP의 이변량 분포를 추출한다. 그리고 그 이변량 분포의 최빈값이 이중편파변수 관계 위에 있도록 한다. 그러나 문제는 최빈값이 이중편펴변수의 어느 곳에 위치해 있느냐 이다. 이에 0에서 10등급까지 반사도를 0 dBZ에서 10 dBZ까지 1 dBZ 간격으로 가산하여 이때 이변량 분포의 최빈값이 이중편파변수 관계 위에 있도록 ZDR과 KDP를 증감한다.
각 등급에 따른 Z, ZDR, KDP를 산정하여 레이더 강수를 추정하고 그 레이더 강수의 정확도를 산정하여 최고 등급에서의 Z, ZDR, KDP를 최적의 편파변수로 보았다. 이때 사용된 정량적 정확도 기준은 Eq. (6)과 같은 1-NE이다. 1-NE는 1에서 NE (Normalized Error)를 뺀 후 백분률화 한 값으로 100%에 가까울수록 품질이 높음을 의미한다. 이러한 1-NE는 편의와 변동성이 함께 정량화된 값이기 때문에 최대값을 나타내는 1-NE에서 편의와 변동성이 혼합된 오차가 최소가 됨을 의미한다.
여기서, Ri는 레이더 강수량을, Gi는 우량계 강수량을 나타낸다.
본 연구에서는 단일편파인 반사도만을 적용하기 때문에 Yoon, Suk, et al. (2016)의 방법에서와 같이 반사도만을 조절해가며 레이더 강수의 정확도가 최적이 되는 레이더 반사도를 결정하였다. 이를 위해 반사도를 0 dBZ에서 20 dBZ까지 1 dBZ 간격으로 가산하였다.
3. 대상 영역 및 적용자료
본 연구에서는 관악산기상레이더를 적용하였다. 관악산 기상레이더는 1969년 수도권 기상감시를 목적으로 도입된 국내 최초의 기상레이더이다. 관악산기상레이더는 최초 도입 후 1988년과 2005년에 각각 C밴드와 S밴드 도플러 레이더로 교체되었다. 관악산기상레이더가 S밴드 레이더로 교체되어 관측이 개시된 시점이 2005년 12월이고 2016년부터 이중편파레이더로 교체되었기 때문에 본 연구에서는 2006년부터 2015년까지 6월에서 10월 사이의 189개 강수 사례를 적용하였다.
레이더 반사도는 1 km × 1 km 공간 해상도와 10분 시간 해상도의 1.5 km CAPPI로 표출되었고 레이더 강우 강도로 변환하기 위해 A=300, b=1.4를 적용하였다. 10분 단위의 레이더 강우 강도는 1시간 단위의 레이더 강우량으로 변환하였고 이러한 1시간 단위의 레이더 강우량은 레이더 반경 100 km 이내의 AWS 1시간 단위 강우량과 비교하였다(Fig. 1).
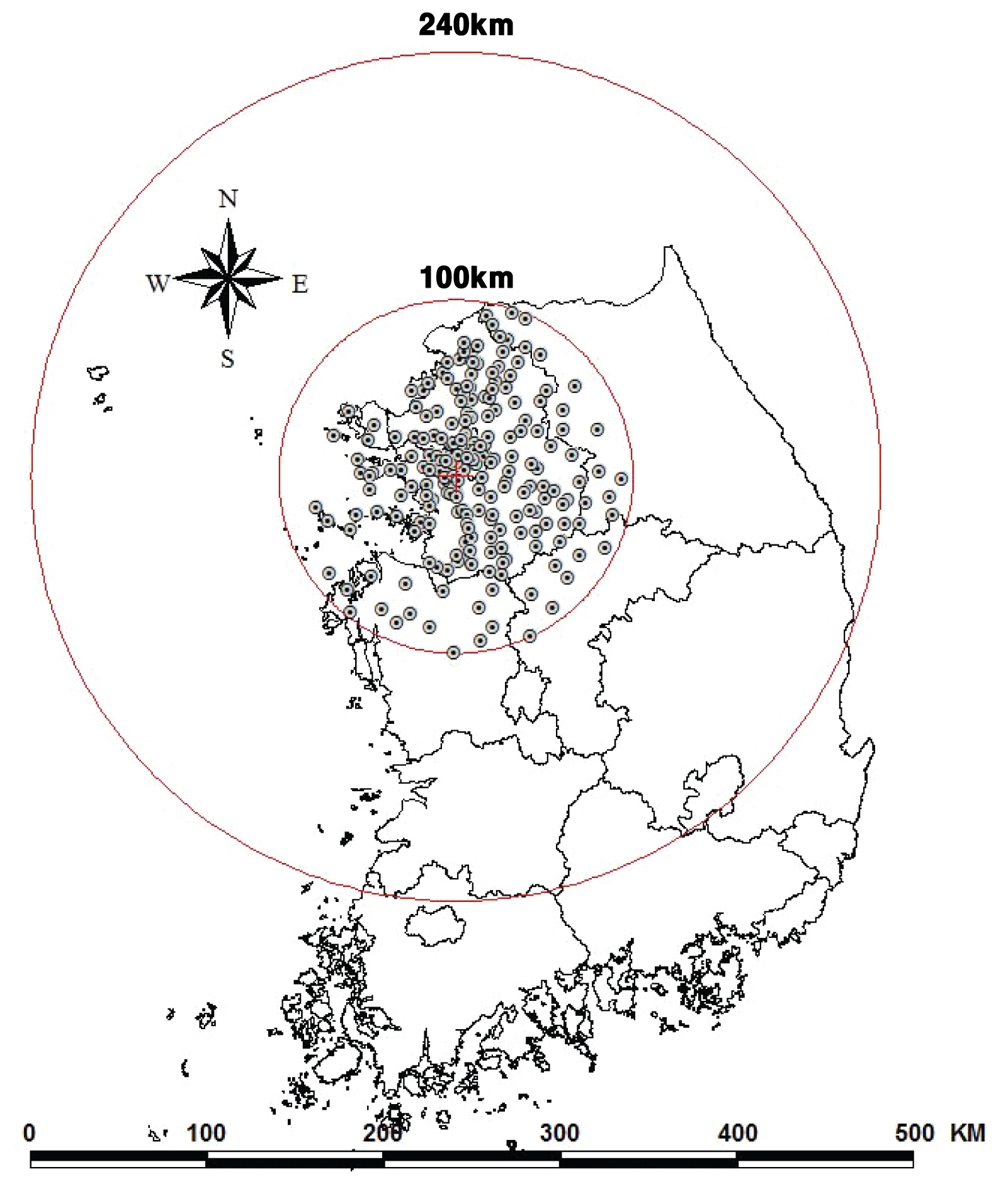
Location of Kwanaksan Weather Radar and AWSs Within Radar Range of 100km
4. 레이더 반사도 오차 정량화
4.1 레이더 강우 추정 편의를 이용한 반사도의 편의 산정
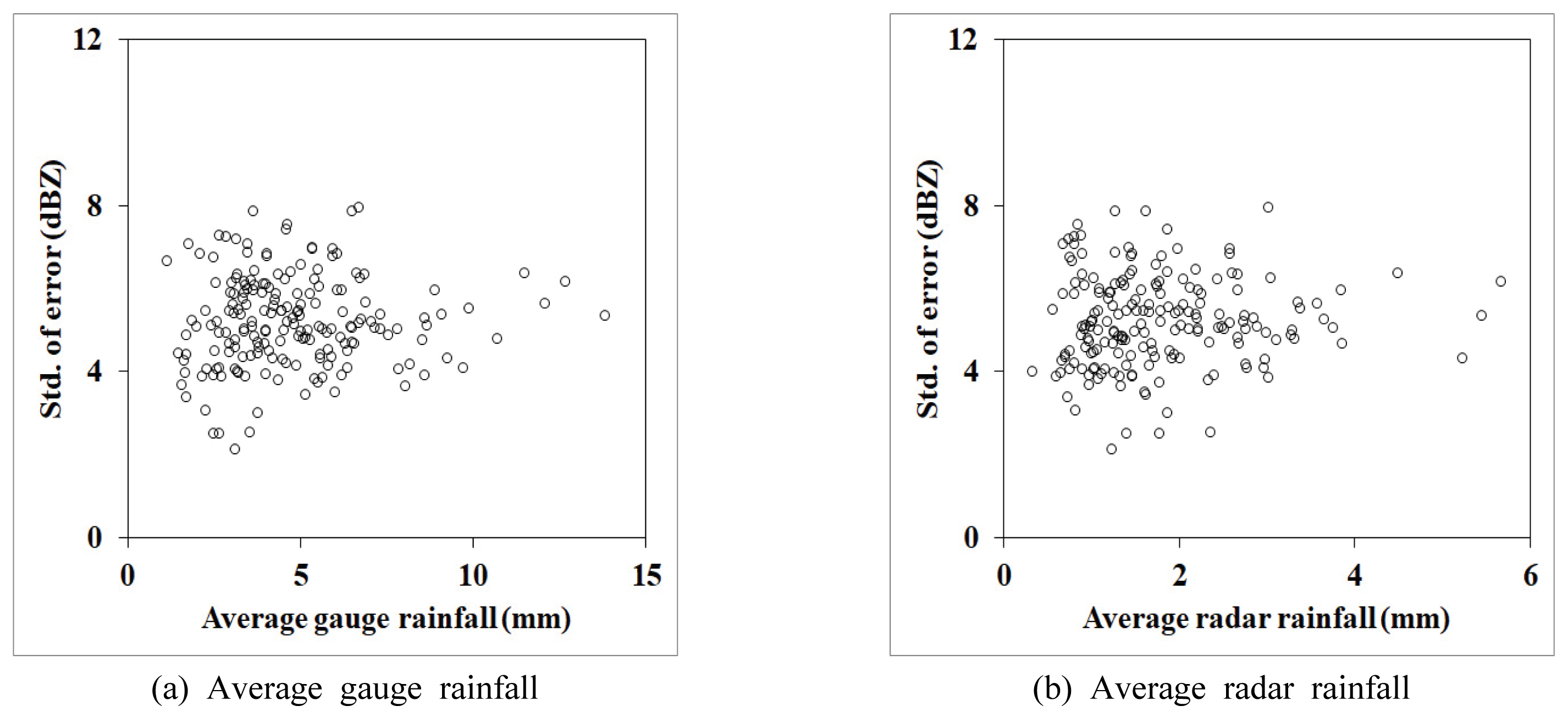
본 연구에서는 총 189개의 강수 사례를 이용하여 레이더 반사도의 오차를 정량화하였다. Fig. 2(a)는 189개 강수 사례에 대한 레이더 강우와 우량계 강우의 상관계수를 나타낸다. 그림에서와 같이 레이더 강우와 우량계 강우의 상관계수는 0.6 이상으로 그 변수들 간의 상관성이 높게 나타나고 있다. Fig. 2(b)는 우량계 평균강우량과 레이더 평균강우량의 산점도를 나타낸다. 전체 강수 사례에 대한 우량계강우의 평균은 4.79 mm이며, 레이더강우의 평균은 1.78 mm로 레이더 강우는 우량계 강우에 비해 정량적으로 37% 정도로 나타나고 있다.
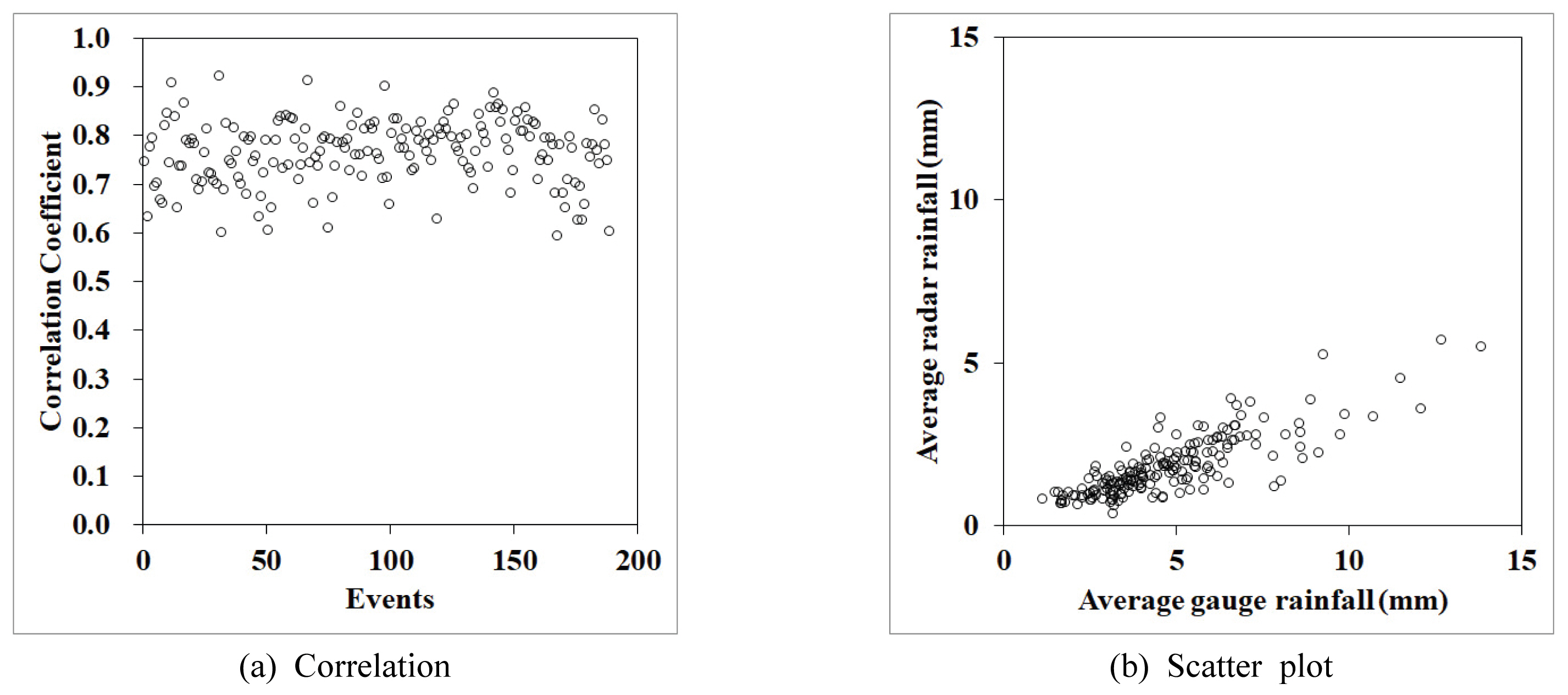
Correlation and Scatter Plot Between Gauge Rainfall and Radar Rainfall
Fig. 3은 우량계 평균강우량과 레이더 평균강우량에 따른 추정 편의
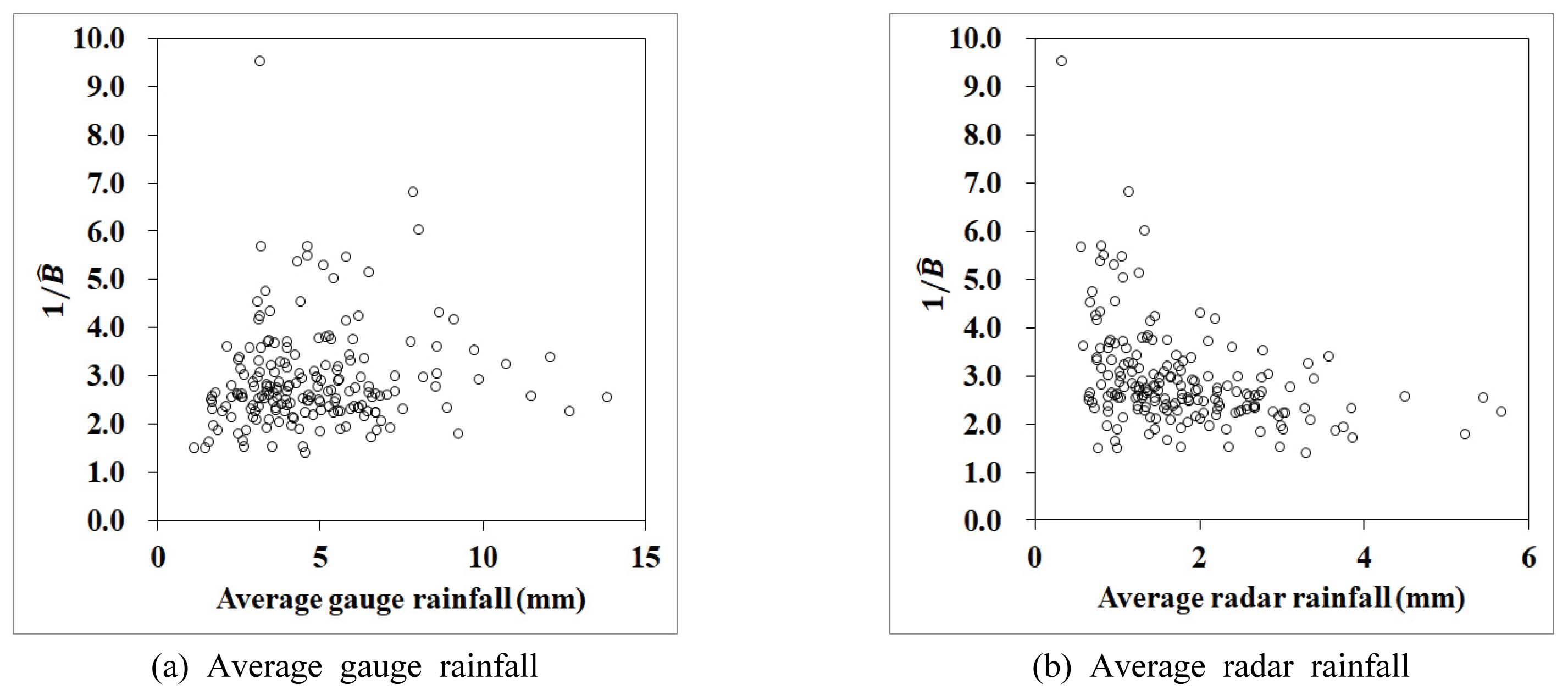
Estimated Bias of Radar Rainfall with Respect to Average Rainfall
레이더 반사도의 편의는 Eq. (5)로부터 산정할 수 있다.
Eq. (5)의 B는 Fig. 3에서 산정한
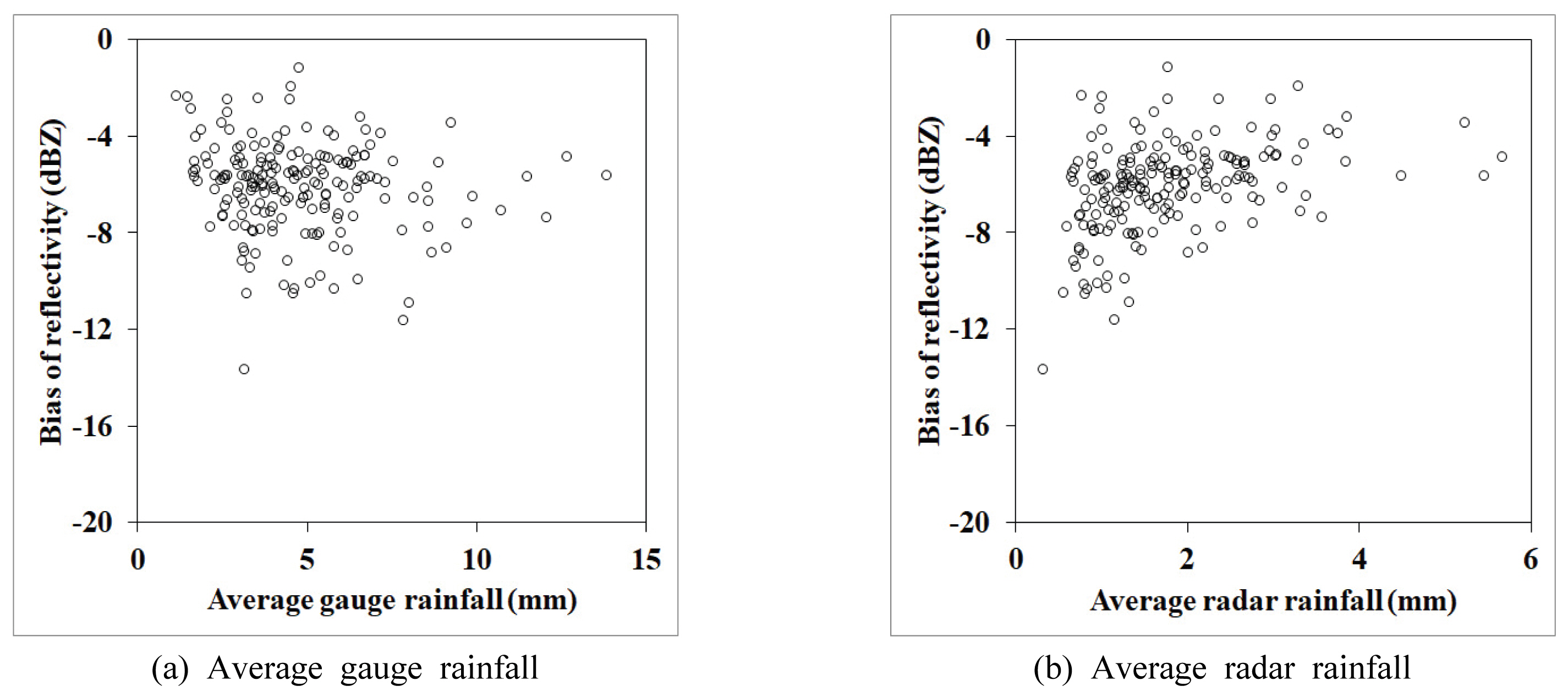
Bias of Reflectivity in the Case of Assuming Error Variance is 0
레이더 반사도는 Fig. 4에서와 같이 산정된 반사도의 편의를 이용하여 보정할 수 있다. 예를 들어 2013년 7월 22일 호우사례의
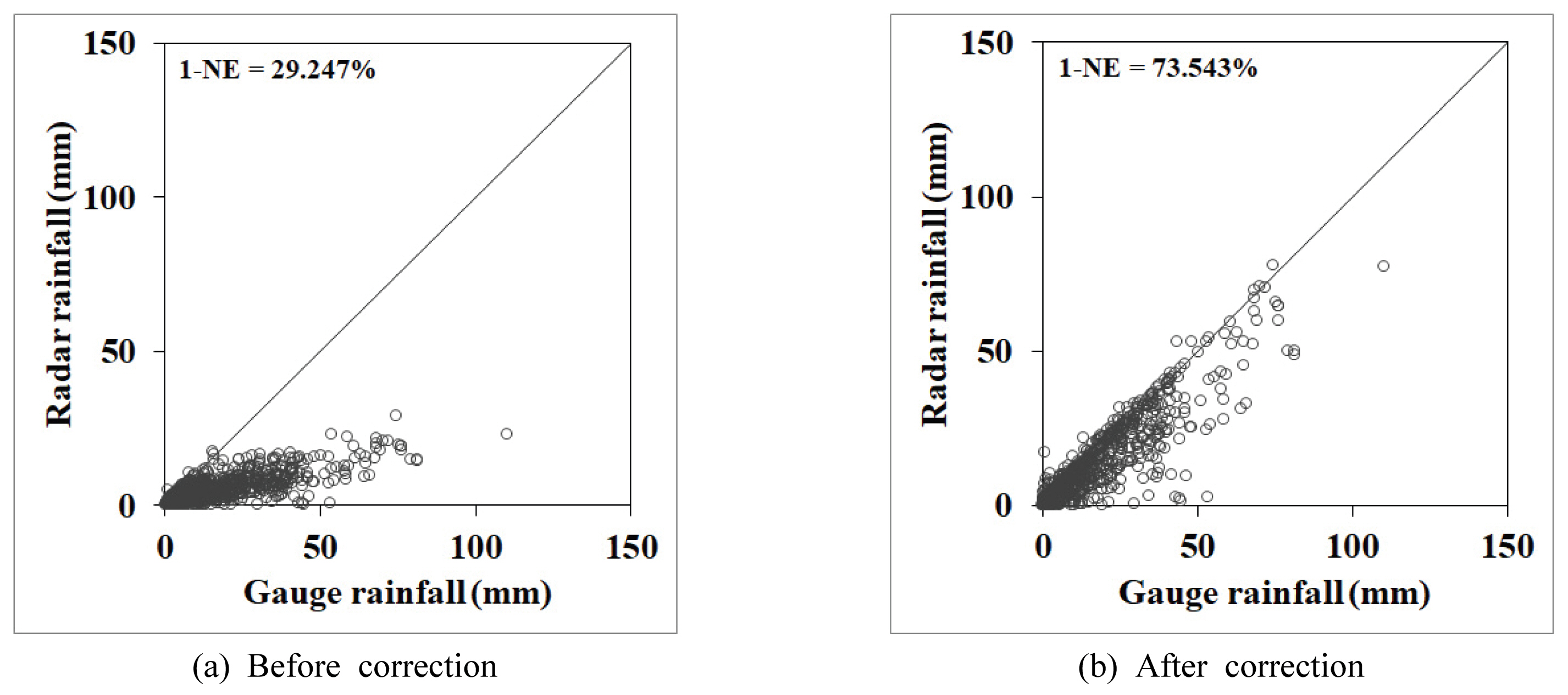
Scatter Plots Between Gauge Rainfall and Radar Rainfall Before and After Correction for Reflectivity Bias
한편 보정 이후에는 그 편의가 다소 개선되어 73.543% 1-NE 값으로 나타났다. 이는 편의 보정으로 44.296%의 개선효과를 보인 결과이다. 앞서 우량계 강우가 최대로 나타난 지점에서 레이더 강우는 77.25 mm로 나타나고 있으며 이는 그 우량계 강우의 대략 69.9%에 해당하는 양이다. 그러나 이러한 편의 보정 이후에도 레이더 강우는 여전히 우량계 강우에 비해 작게 나타나고 있다. 이는 앞서 Eq. (5)에서 오차분산
4.2 경험적 방법을 이용한 반사도 편의 산정과 오차분산 추정
Fig. 6은 Yoon, Suk, et al. (2016)에서 적용한 경험적 방법을 이용하여 산정된 조절등급에 따른 레이더강우량의 정확도이다. 적용된 호우사례는 2013년 7월 22일 사례이다. 그림에서와 같이 레이더강우량의 정확도는 조절등급이 높아짐에 따라 증가하다 10 등급에서 최고값을 나타내고 있다. 그리고 10등급 이후부터는 정확도가 감소하는 것으로 나타나고 있다. 레이더 반사도에 10 dBZ를 가산해야 최소의 오차를 나타내므로 이 호우사례에서 경험적으로 산정된 레이더편의는 -10 dBZ 임을 의미한다. 이는 앞서 오차분산이 0으로 가정한 경우에서 산정된 -7.402 dBZ보다 2.598 dBZ 더 낮은 값이다. 이러한 2.598 dBZ 부분의 편의는 앞서 설명한 바와 같이 오차분산으로 인한 것이다. Eq. (5)로부터 오차분산을 역으로 추정하면 오차분산은 5.6212 dBZ2로 추정된다.
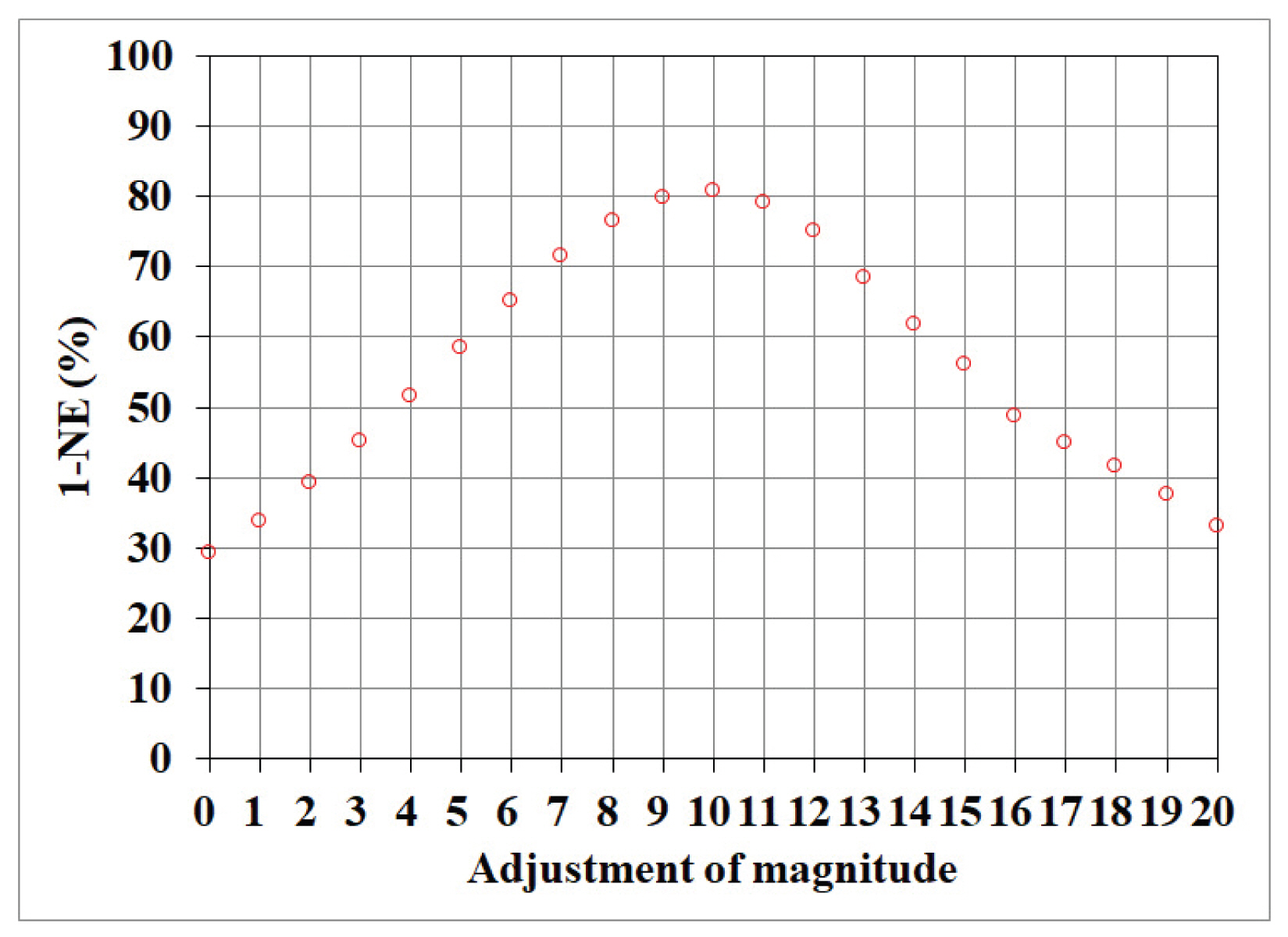
Accuracy of Radar Rainfall with Respect to Adjustment of Reflectivity Bias (22 JUL 2013)
Fig. 7(a)은 우량계 강우와 실제 레이더 반사도의 편의가 보정된 레이더강우와의 산점도를 나타낸다. 레이더 강우의 정확도는 80.802%의 1-NE 값을 나타내고 있으며 이는 오차분산을 0으로 가정한 경우에 비해 7.259% 높은 값이다. 이 경우 우량계 강우가 최대로 나타난 지점에서(110.5 mm)에서 레이더 강우는 109.23 mm로 나타나고 있으며 이는 우량계 강우의 대략 98.9%에 해당하는 양이다. 그림에서와 같이 레이더 강우의 편의는 거의 제거되었고 무작위 오차만이 남아 있다. 한편 Fig. 7(b)은 우량계 강우와 G/R비를 이용하여 보정된 레이더 강우의 산점도를 나타낸다. G/R비를 이용하여 보정된 레이더 강우는 양적으로 우량계강우와 거의 유사해졌음을 알 수 있다. 즉, 편의는 거의 제거되었다. 그러나 무작위 오차가 너무 크게 나타나고 있어 1-NE의 값도 반사도 편의를 보정한 경우에 비해 25.575%나 작은 55.227%에 불과하였다. 이러한 결과로부터 본 연구의 방법보다 G/R비를 이용하여 보정하는 경우 레이더 강우의 편의는 제거 되고 있으나 오차에 대한 변동성이 높아지고 있음을 확인할 수 있다.
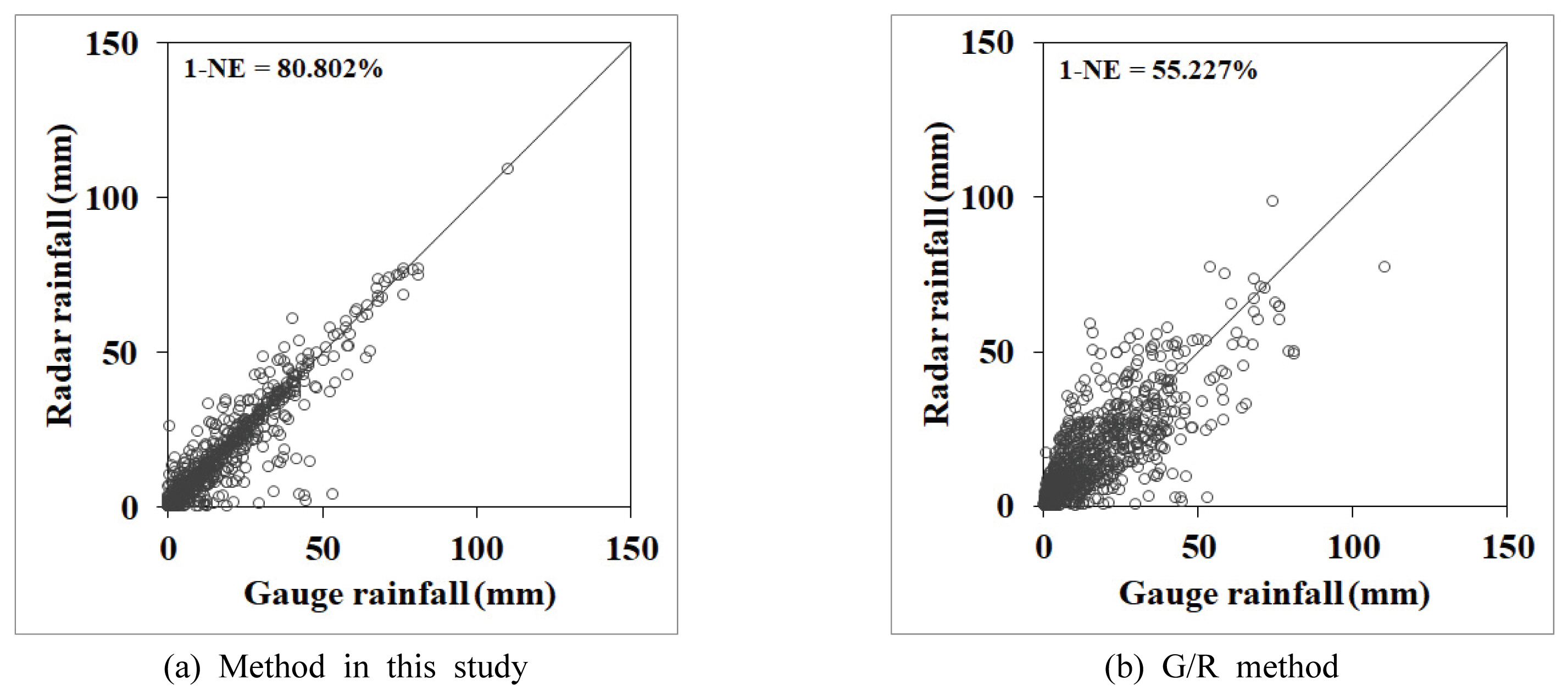
Scatter Plots Between Gauge Rainfall and Radar Rainfall Corrected by the Method in this Study and G/R Method (22 JUL 2013)
전체 강수사례에 대한 레이더 반사도의 실제 편의를 구한 결과가 Fig. 8과 같다. 전체적으로 레이더 반사도의 편의는 –3 dBZ에서 –15 dBZ로 나타났다. 그림에서와 같이 레이더 반사도 편의의 경향성은 앞서 오차분산이 0인 경우와 크게 달라진 것은 없다. 다만 그 편의가 앞선 경우보다 크게 나타나고 있을 뿐이다. 한편 Fig. 9는 우량계 평균강우량과 레이더 평균강우량에 따른 오차분산을 나타낸다. 그림에서와 같이 오차분산은 22∼82 dBZ2 사이에서 변동하는 것으로 나타나고 있다.
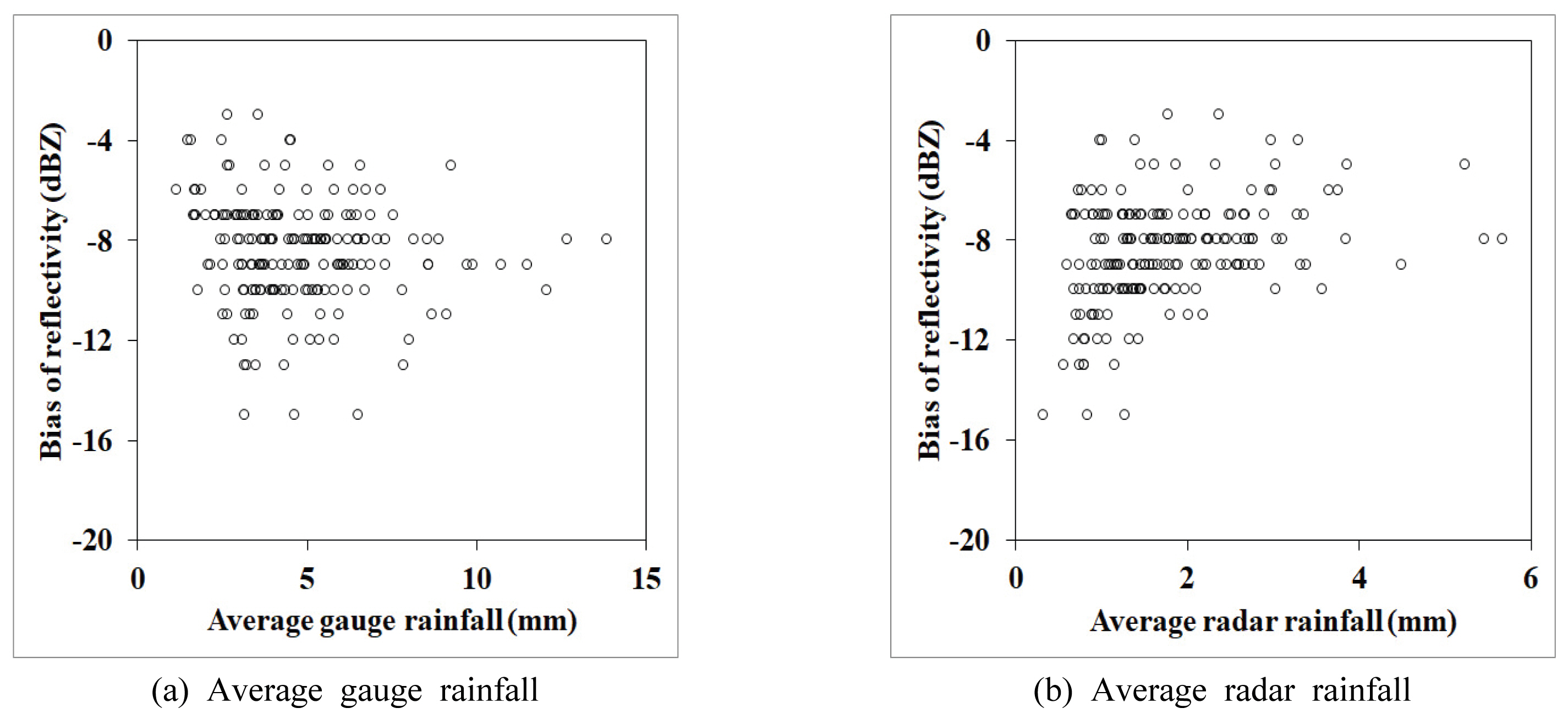
Bias of Reflectivity with Respect to Average Rainfall
Error Variance of Reflectivity with Respect to Average Rainfall
레이더 반사도의 편의를 보정하기 위해서는 레이더 반사도에 편의의 크기만큼을 더해주면 된다. 그러나 오차분산은 무작위 오차로 나타나는 부분이기 때문에 그 제거가 편의를 제거하는 것과 같이 쉽지 않다. 예를 들어 관악산레이더의 경우 반사도에 2013년 7월 22일 호우사례의 편의 7.402 dBZ를 더해주면 Eq. (5)에서 B는 1이 되어 우측 첫 번째 항은 0이 되나
5. 결 론
본 연구에서는 지난 10년 동안 국내에서 제기되어 온 레이더 강우의 과소한 문제점에 대한 해결책을 제시하기 위해 레이더 반사도에 내재되어 있는 오차를 정량화 하였다. 이를 위해 2006년부터 2015년까지 6월에서 10월 사이의 189개 강수 사례를 적용하였으며 그 결과는 다음과 같다.
첫 번째, 189개 전체 강수 사례에 대한 우량계강우의 평균은 4.79 mm이고 레이더강우의 평균은 1.78 mm로, 레이더 강우는 우량계 강우에 비해 정량적으로 37% 정도에 불과하였다. 레이더 강우의 추정 편의
두 번째, 레이더 반사도의 편의는 우량계의 평균강우량이 작은 부분에서는 변동성이 크게 나타나다 그 평균 강우량 값이 커질수록 대략 -5∼-6 dBZ 사이 값으로 수렴하는 것으로 나타났다. 한편 레이더의 평균강우량에 따른 레이더 반사도의 편의는 레이더 평균강우량이 작은 경우 그 편의가 매우 크게 나타나며 큰 경우에서는 대략 -5∼-6 dBZ 정도로 수렴하였다. 전체적으로 레이더 반사도의 편의는 –1 dBZ에서 –14 dBZ로 나타났다.
세 번째, 우량계 강우와 레이더 강우로부터 추정된
네 번째, 경험적 방법으로 추정된 실제 레이더 반사도의 편의와 레이더 강우의 추정 편의
레이더 강우는 수문 분야에서의 높은 활용 가능성에도 불구하고 그 정확도에 대한 문제점으로 자료 활용성에 대한 의구심이 제기되어 왔다. 그러나 본 연구를 통해 레이더 반사도의 오차를 정량화하고 보정한다면 레이더 강우의 활용성은 매우 높아질 것으로 기대된다.
Acknowledgements
본 연구는 국토교통부 물관리연구사업의 연구비지원(18AWMP-B079625-05)에 의해 수행되었습니다.