UAV를 활용한 하천측량에서 최적고도매개변수 설정: 지내천 사례를 중심으로
Determining the Optimum Altitude Parameter for River Surveying Using UAVs: Case Study on Jinae-cheon Stream
Article information
Abstract
하천측량은 하천의 홍수예방을 위한 계획, 정비, 운영 등에 매우 중요한 요소이다. 이제까지는 일반적인 현장에서의 직접측량이 일반적으로 이루어져왔으나 최근에는 Unmanned Aerial Vehicle (UAV)를 이용한 하천측량이 다방면에 이용되고 있다. 특히 하천의 경우 둑마루(Top), 하상(Bottom), 경사(Slope)면이 항상 존재하고 있고 물의 흐름을 따라 길게 하천이 형성된다. 이러한 하천의 특성을 반영한 UAV의 촬영매개변수가 설정되어야 한다. 이를 위해 본 연구에서는 하천의 항공촬영매개변수 중 최적 촬영고도를 추정하는 연구를 실시하였다. 연구대상지로 진주 집현면에 위치한 지내천 내의 구역을 설정하였고 50 m에서 120 m에 걸쳐 10 m마다 고도를 상승시켜가며 촬영을 진행하였으며 10개의 Ground Control Point 지점을 이용하여 촬영성과를 보정하고 38개의 검사점을 통하여 촬영한 결과로부터 나온 검사점의 고도정보와 실제 측량을 통해 얻은 고도를 비교하여 오차를 산정하였다. 산정결과 70 m부터는 오차가 상대적으로 크게 나타나는 것으로 확인되었으며 특히 하상(Bottom)에서의 오차가 보다 크게 나타나는 양상을 보였다. 또한 오차는 일반적으로 양수 형태로 나타났으며 이는 하천의 하상에서 두드러지는 것으로 나타났다. 본 연구결과는 보다 다양한 하천에서의 연구결과를 통해 하천측량을 위한 촬영고도 설정에 의미있는 결과를 제시해 주는 것으로 판단되며 앞으로 주요 촬영매개변수들에 대한 연구를 바탕으로 UAV하천측량에 중요한 기준이 마련될 수 있을 것으로 판단된다.
Trans Abstract
River surveying plays an important role in planning, maintenance, and operation of river flood prevention. Thus far, direct surveying has been mainly performed in the field. However, river surveying using an unmanned aerial vehicle (UAV) was recently applied to the hydrologic field. A river consists of top, bottom, and sloped surfaces, and a long stream is generally formed following the flow of water. The photographic parameters of the UAV, including the flight altitude, must be adjusted as per the characteristics of a river. Therefore, in this study, we focused on estimating the optimal photographing altitude for river surveying. The Jinae-cheon stream area located in Jiphyeon-myeon, Jinju was used as the research site, and the flight altitudes for the images were tested from 50 m to 120 m, increasing the altitude every 10 m. The images were corrected afterwards using 10 ground control points, and the error was calculated using 38 reference points. Therefore, it was confirmed that the error appeared relatively large from 70 m, and at the bottom. Moreover, the error was generally positive for the riverbed. This study provides useful results to regulate the photographing altitude for river surveying, and the results can be employed with extensive studies on diverse rivers to establish the standard UAV parameters.
1. 서 론
하천측량은 일반적으로 하천의 단면 및 경사 등을 측정하여 하천의 횡단면 및 종단면을 작성하기 위해 실시하게 된다. 이를 통해서 하천에 대한 기본계획 및 구조물 설계 등에 필요한 자료를 얻게 된다(Lee and Lyu, 2015; Choi et al., 2019). 하천측량 자료는 특히 하천모델링을 통한 하천홍수량등의 물리량을 결정하는 중요한 요소이며 연속적인 하천단면 자료가 필요한 경우가 있다(Hong et al., 2017). 기존의 하천측량은 평면측량, 수준측량, 수심측량 등의 현장측량을 실시하고 있으나 이러한 직접측량은 많은 시간 및 비용이 필요하며 급변하는 하천정보를 수집하는데 제한적이다.
이러한 제약을 해소하기 위해 Unmanned Aerial Vehicle (UAV)을 기반으로한 하천측량등이 실시되고 있다(Langhammer and Vacková, 2018; Vogt and Schlesinger, 2019; Annis et al., 2020; Forbes et al., 2020; You et al., 2020). Langhammer and Vacková (2018)는 UAV 하천측량 및 DEM 자료를 기반으로 하천홍수의 지형학적 영향을 연구하였다. Stewart et al. (2018)는 UAV 자료의 하천을 포함한 자연재해영향 평가에 관련된 이용현황 등을 기술하였다. Annis et al. (2020)은 Lidar Digital Elevation Model (DEM)을 이용해서 홍수시뮬레이션의 침수범위를 설정하기 위한 연구를 실시하였다.
이와 더불어 최근 국내의 정부에서는 전국 주요하천에 UAV를 기반으로 한 하상변동조사 및 하천측량 시범사업을 진행하고 있으며 국내 주요 하천인 한강, 낙동강, 금강, 영산강 및 지류 구간을 대상으로 UAV 측량을 적용하고 있다(Park et al., 2015).
UAV를 통해 하천측량을 실시하기 위해서는 하천의 특성을 고려한 UAV의 촬영매개변수(고도, 각도, 중첩량, 방향)들이 적정히 선정되어야 한다(Pilotti, 2016; Watanabe and Kawahara, 2016; Thumser et al., 2017; Langhammer, 2019; Annis et al., 2020). 특히 하천의 경우 하천의 유량이 직접적으로 닿지 않고 평평하게 형성된 하천의 상부, 물의 중력이 가장 크게 작용하는 하상, 그리고 높이가 지속적으로 변하게 되는 하상경사면 등이 존재하고 있다. 하상의 단면을 보다 적정히 측정하기 위해서는 이러한 하천의 특성을 고려한 UAV 촬영매개변수들이 테스트되어야 하나, 현재까지 UAV하천측량을 위한 매개변수들에 대한 테스트에 관한 연구는 많지 않은 실정이다. 따라서 본 연구에서는 UAV의 촬영매개변수들 중 UAV의 고도 설정에 대한 연구를 실시하였으며 하천측량을 위한 UAV의 적정한 촬영고도에 대해 제시하고자 한다.
일반적으로 UAV의 일반적인 측량 고도는 40 m~150 m 이내에서 이루어져 왔다. Kim and Kim (2018)은 40 m와 100 m에 대해 비행고도별 지적기준점 및 필지경계점 정확도를 분석하였으며 40 m일 때 0.024 m, 그리고 100 m일 때 0.034 m의 평균오차가 발생함을 보여주었다. Kim et al. (2018)은 70, 100, 150 m를 촬영하여 얻은 분석결과에서 표고오차가 0.81 m, 0.117 m, 0.147 m로 각각 증가함을 보여주었다. 이러한 고도와 표고오차간의 상관관계는 고도가 올라갈수록 표고오차가 증가함을 보여주고 있으나 그 증가양상이 항상 일률적이지는 않음을 알 수 있다(Han, 2019).
하천측량의 경우에도 촬영고도는 현장여건 및 비행고도 제한으로 40~150 m 이내의 비슷한 범위에서 이루어지는 것으로 파악된다. 하지만, 하천측량의 경우 동일한 범위를 측량할 경우 고도가 낮아질수록 UAV의 비행시간이 길어지고, 하천이 계곡에 위치하는 경우가 많아 바람의 영향을 많이 받을 수 있으며, 또한 경사면과 하상바닥 그리고 둑마루의 다른 특성을 가지는 3가지 단면이 존재하고 있어 태양각에 의한 오차 등을 복합적으로 반영한 특정 촬영고도에 설정될 필요가 있을 것으로 판단된다.
2. 연구 영역
연구대상지로 Fig. 1에 나타난 바와 같이 진주시 집현면에 위치한 소하천인 지내천 내의 구역을 설정하였다. 지내천 유역은 동절기에는 대륙성 기후의 영향을 받아 한랭건조하며 하절기에는 해양성기후로 고온다습하다. 6월 중순부터 고온다습한 기상으로 강우일수도 많고 기상현상도 매우 급변하는 특징이 있어 홍수에 민감하다. 지내천 유역은 전형적인 하천단면 형상인 상부, 하상, 경사면을 갖추고 있다. 하폭은 50 m이며 계획홍수량은 321 m3/s, 홍수위는 20.95 m이다. 지내천은 집현면을 통해 흐르다가 남강에 합류된다.

Study Area of the Applied Stream, Jinae-cheon in South Korea, Located in the Province of Jinju City (Top Panel) and the Orthorectified Mosaic Image of the Study Area Including 10 GCP Points (G1-G10, White Color) and 38 Reference Points (1-38, Yellow Color)
3. 적용 방법
3.1 UAV Aerial Surveying
대상하천에 대해서 UAV 하천측량을 실시하였으며 보다 정확한 측량을 위해 지상에 10개의 Ground Control Points (GCPs)를 지정한 후 사진촬영을 진행하였다. 각 지점에 대한 정보는 Fig. 1 하부패널에 나타나 있다(G1~G10). 사용된 UAV는 일반적인 하천측량에 가장 많이 사용되고 있는 DJI사의 Phantom4를 사용하였으며 사용된 카메라의 사양은 FC3411, 1/2500 seconds, ISO-120, and 5,472 × 3,648 pixels이다.
이와 더불어 하천측량성과에 대한 값을 검증하기 위해 38개의 검사점(reference points)을 적용하였다. 적용된 검사점에 대한 위치는 Fig. 1에 나타나 있다. 10개의 GCP와 38개의 검사점을 먼저 지상에 설치한 후 Global Positioning System (GPS) 측량을 통해 정확한 위치를 측정한 후, 항공촬영을 실시한다. 항공사진에 표시된 GCP와 검사점에 대해서 향후 Post-processing 과정에서 값을 비교하여 보정 및 검증을 실시하게 된다.
3.2 Post-processiong
촬영된 항공사진에 대해서 WebODM 상용프로그램을 이용하여 정사영상 및 Digital Surface Model (DSM) 자료를 구축하게 된다. 이때 정확도를 높이기 위해 10개의 GCP를 이용해서 보정을 하게 되며 38개의 검사점은 최종적으로 나오게 되는 DSM 자료 등을 통한 결과에 대해서 얼마나 정확한지 검증하는 절차를 밟게 된다.
Fig. 2에는 WebODM을 이용해서 나온 연구대상유역의 Point cloud data 및 DSM 자료가 패널(b) 및 (c)에 나타나 있으며, 패널(a)에는 항공사진측량을 통해서 얻어진 정사합성사진이 나타나 있다. Fig. 2(b)의 Point cloud 자료는 센서를 통해 물체에 빛/신호를 보내서 돌아오는 시간을 기록하여 빛/신호당 거리 정보를 계산하고 포인트를 형성하여 만들어지게 된다. 이를 통해서 Fig. 2(c)의 DSM가 구축되게 된다. 또한 Fig. 2(a)에 고도 50 m 및 100 m에서 촬영한 카메라의 각도 및 고도가 사각박스 형태로 나타나 있다. 그 우측 상단에는 각각의 고도에서 촬영된 영상이 포함되어 있다.

Aerial Photogrammetry Procedure with WebODM Software for (a) Aerial Images Taken from UAV, (b) Point Cloud Data, and (c) Digital Surface Model (DSM). Note that the Square Shapes over the Sky in the Panel (a) Indicate the Camera Locations and Angles for 50 and 100 m Heights and the Top Right-Side Square Portion in the Panel (a) Presents One of the Photos Taken from the UAV
영상에서 나타난 바와 같이 양쪽의 제방형태가 다른데 하천의 우안은 농로가 위치해 있어 둑마루(Top)는 매우 평평한 상태이나 좌안은 제방자체 만으로 되어 있어 우안만큼 평평한 상태는 아니다. 좌안 제방이 끝나고 뒤에 농로가 위치해 있어 평평한 상태이다. 또한, 하상은 자갈층이나 암석층이 드러나지 않은 수풀이 존재하며 중간중간에 웅덩이들이 형성되어 있다. 경사면은 1/2 정도의 일반적인 경사면으로 구성되어 있어 국내 소하천의 전형적인 형태를 띄고 있다.
3.3 Accuracy Test of Altitude
UAV의 고도는 올라갈수록 중첩률이 높아지거나 촬영횟수가 줄어드는 장점이 있는 반면에 대상물과 멀어져 정확도가 떨어지는 단점이 존재한다, 또한 일반적으로 소하천의 경우 인근의 산지에 대한 영향을 받게 되어 적정한 촬영고도 설정은 매우 중요한 촬영매개 변수이다. 하지만 고도가 낮을수록 촬영시간이 길어지는 단점이 존재하며 이러한 과정에서 오차에 영향을 주는 다양한 환경적요소가 발생할 수 있을 것으로 판단된다. 특히 산간지방에 위치한 하천의 경우는 계곡에 위치하는 경우가 많아 바람의 영향을 받는 가능성이 더 많은 것으로 판단되나, 이러한 요소를 모두 고려해서 하천의 UAV 측량을 실시하기는 현실적으로 어려운 실정이므로 연구를 통해 하천측량에서의 적정고도를 설정해 줄 필요가 있을 것으로 판단된다.
적정한 고도를 산출하기 위해 50 m에서 120 m까지 10 m씩 증가시켜가며 촬영을 진행하였다. 우리나라의 경우 허가 없이 가능한 비행고도는 150 m로 정해져 있다. 너무 낮은 고도로 비행할 경우 인근 지장물과의 충돌에 대한 우려와 UAV의 비행시간에 제한이 있어 최소 비행고도를 50 m로 하였으며, 인근에 야산이 있다는 점과 고도제한으로 인해 최대 비행고도를 120 m로 제한하였다.
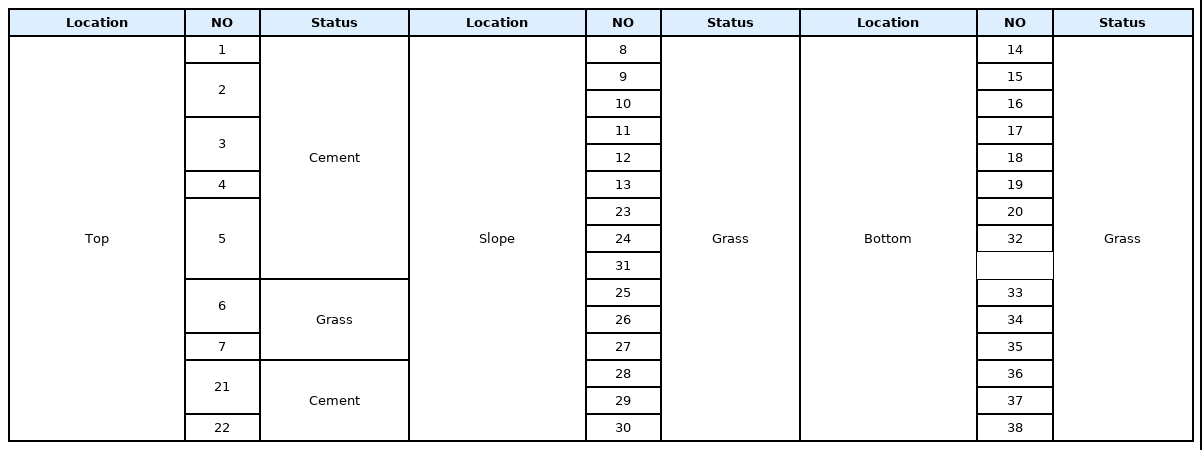
38개 검사점 중 하천의 둑마루(Top), 하상(Bottom), 경사면(Slope)을 구분하여 측량오차를 측정하였고 각각의 구분자료는 Table 1에 나타내었다. 측정오차는 Root Mean Square Error를 통해 나타내었으며 아래의 식과 같다.
여기서 xi 는 GPS를 통해 현장측량된 값을 의미하고, Xi 는 UAV 하천측량을 통해 얻은 값을 의미하며, n은 자료의 갯수를 나타낸다.
4. 결 과
38개의 검사점을 기준으로 GPS 측량한 값과 UAV 측량을 통해 나온 고도 값을 비교하여 그 오차를 계산하였고 전체적인 고도에 따른 결과는 Fig. 3에 나타나 있다. Fig. 3의 상부패널에는 고도에 따른 RMSE가 나타나 있으며 하부에는 38개 각각의 오차를 Boxplot 및 x마커들로 표시하였다.
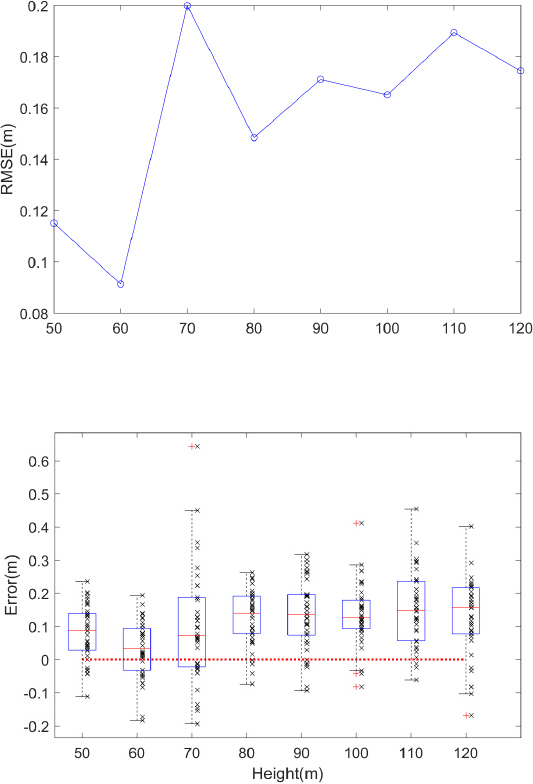
RMSEs and Errors Along with the Heights of the Flight Altitude. Note that (1) The Bottom Panel Presents Boxplots and Their Real Error Values are Presented with x Markers; and (2) The Dotted Straight Line at the Bottom Panel Illustrates Zero Value that No Errors Occur
제시된 결과에 따르면 RMSE는 50-60 m에서 낮은 오차를 유지하다가 70 m부터 높은 오차를 보이는 것을 알 수 있다. 이는 각각의 오차가 있는 Fig. 3의 하부패널에도 잘 나타나 있다.
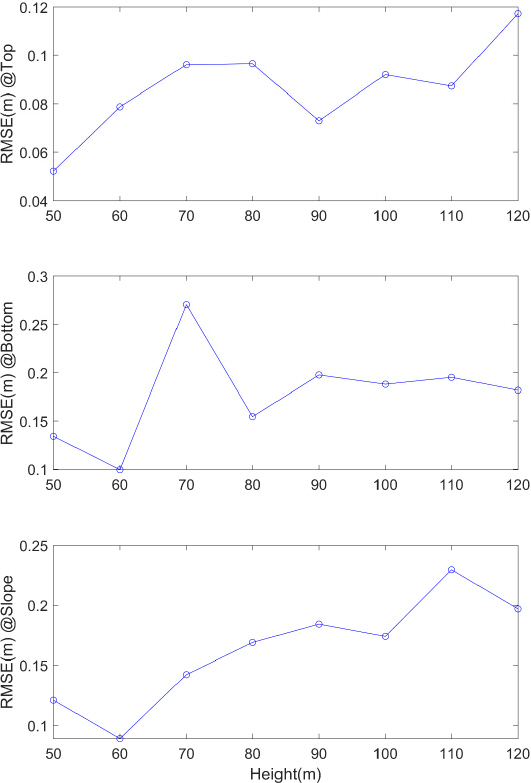
이를 세분화하여 하천의 둑마루(Top), 하상(Bottom), 경사면(Slope)으로 구분하여 그 오차를 분류하여 Fig. 4에 나타내었다. 또한 각각의 오차를 violinplot으로 표시하여 Fig. 5에 나타내었다. RMSE에서 하천의 하상(Bottom)에 대해 70 m 고도에서 높은 오차를 보이는 것을 알 수 있으며, 전체적인 결과인 Fig. 3의 RMSE에도 영향을 미친 것으로 보인다. 개개의 오차값을 표현한 Fig. 5의 중간패널에 나타난 바와 같이 하천 하상(Bottom)의 70 m에서 큰 오차 값들이 존재한다는 것을 알 수 있다.
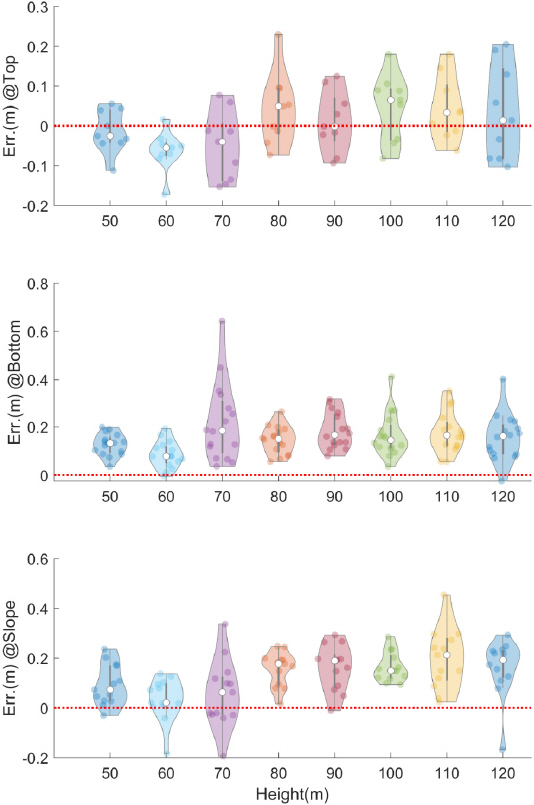
Errors Along with the Heights of the Flight Altitude for Different Locations the Reference Points. Note That (1) Each Panel Presents Violinplots and Their Real Error Values are Presented with x Markers; and (2) The Dotted Straight Line at the Panel Illustrates Zero Value that No Errors Occur; (3) Circle in the Middle of the Violin Plot Presents the Median with Whiskers Extending to the Maximum and Minimum
Fig. 4의 상부와 하부패널에 나타난 바와 같이 하천의 둑마루와 경사면은 거의 비슷한 결과가 보여지는 것을 확인할 수 있다. 촬영고도 70 m까지 증가하는 경향을 보이다가 그 이후인 80~100 m까지는 비슷한 경향을 보이며 그 이후에 다시 증가하는 경향을 보이는 것을 알 수 있다.
Fig. 4에서 보는 바와 같이 RMSE (m) 범위는 둑마루보다 사면과 하상이 높음을 확인할 수 있다. 하상, 경사면, 둑마루에서 오차를 보이는 이유는 하상과 경사면에는 식생이 다수 분포한다. 이에 반해 둑마루의 경우는 농로부분을 많이 포함하여 노면의 평탄하고 카메라와 거리상으로도 가장 가까워 보다 정확한 항공측량이 가능한 것으로 보이나 추가연구를 통해 다양한 하천에서 이를 보완할 필요가 있을 것으로 보인다. RMSE뿐만 아니라 Mean Absolute Error (MAE)도 구하여 비교하였으나 공간 제약상 본문에는 첨부하지 않았다. MAE와 RMSE결과는 거의 동일한 결과를 보임을 확인하였다.
Fig. 5에 보여진 각각의 오차에는 오차의 경향성을 볼 수 있다. 중간패널에 나타난 하상(Bottom)에서의 오차들은 모든 고도에서 (+)인 경향이 보인다. 상대적으로 낮은 고도에 위치한 하상에서 보정이 들어가게 되어 하상에서의 오차가 (+)인 경향을 지닐 수 있을 것으로 보인다. Fig. 5의 상부패널에서는 이와 다르게 둑마루(Top)에서 오차가 (+)와 (-)골고루 있으나 대체적으로 80 m 이상에서 둑마루와 경사면에서는 (+)의 오차가 주로 발생하는 것을 알 수 있다. 또한 70 m의 경우 Fig. 5에서 보는 바와 같이 Bottom에서 (+)쪽에서의 큰 오차가 다수 발생한 것이 원인일 것으로 판단된다.
5. 요약 및 결론
하천측량의 다양한 요구에 맞추기 위해 UAV를 통한 하천 측량은 다방면으로 확대될 것으로 보이며, 하천의 특성을 반영한 적정한 UAV 촬영 매개변수들이 설정될 필요가 있을 것으로 보인다. 이를 위해 본 연구에서는 UAV 촬영 매개변수 들 중 가장 중요할 것으로 사료되는 UAV의 비행고도에 대해서 연구하였다. 50 m에서 120 m까지 10 m 간격으로 고도를 상승시켜가며 촬영을 진행하였고 10개의 GCP 지상 GPS 측량값으로 보정을 실시하여 전체적인 고도값을 산정하고 이를 38개의 검사점과 비교하여 오차를 추출하여 비교하였다.
비교결과 Fig. 3의 상부패널을 보면 50 m~120 m중에서 60 m의 고도의 오차값이 가장 작음을 알 수 있다. 50~120 m의 고도중 60 m에서 정확도와 중첩률이 가장 적절함을 알 수 있으나 추가연구를 통해 다양한 하천에서 이를 보완할 필요가 있을 것으로 보인다. 또한, 하상에서는 (+)형태의 오차가 주로 발생하므로 주의가 필요할 것으로 사료된다. 본 연구결과는 향후 다양한 UAV를 이용한 하천측량에 기준을 제시할 수 있을 것으로 보인다. 하지만, 보다 다양한 하천에 대한 비교 연구가 필요할 것으로 보이며, 오차는 GPS 측량 결과가 실제값인 것을 기준으로 실시하여 실제 오차와 차이가 있을 수 있을 것으로 판단된다. 본 연구결과는 하천폭이 비슷한 지점에서 적용이 가능할 것으로 판단되나 하천폭이 크게 차이가 날 경우 이에 대한 추가연가 필요해보인다. 본 연구에서 나온 결과와 같이 하천측량은 일반적인 대상물과 다른 특성을 가지고 있으므로 이를 고려한 촬영매개변수에 대한 다양한 연구가 필요할 것으로 보인다.
감사의 글
본 연구는 한국수자원공사(K-water)의 개방형 혁신 R&D (21-DW-002) 사업의 일환으로 수행되었습니다.