

1. м„ң лЎ
2019л…„ 4мӣ” 4мқј кі м„ұвӢ…мҶҚмҙҲм—җм„ң л°ңмғқн•ң лҢҖнҳ•мӮ°л¶ҲлЎң 1,757 haмқҳ мӮ°лҰјкіј мЈјнғқ 916мұ„ мҶҢмӢӨ л“ұ мқҙлЎң мқён•ң н”јн•ҙм•ЎмқҖ м•Ҫ 1,291м–ө мӣҗм—җ лӢ¬н–ҲлӢӨ(KFS, 2019). мқҙмҷҖ к°ҷмқҙ көӯлӮҙмҷём ҒмңјлЎң лҸ„мӢ¬нҳ• мӮ°л¶Ҳ л°ңмғқмқҙ кёүмҰқн•Ём—җ л”°лқј мӮ°лҰјмқём ‘м§Җ мЈјліҖмқ„ лҢҖмғҒ мңјлЎң мӮ°л¶Ҳ н”јн•ҙ м Җк°җмқ„ мң„н•ң мӮ°лҰј лӮҙ м—°лЈҢкҙҖлҰ¬кё°мҲ к°ңл°ңмқҳ н•„мҡ”м„ұмқҙ лҶ’м•„м§Җкі мһҲлӢӨ(Hussam and Akshat, 2018). мӮ°лҰјмқё м ‘м§Җ мЈјліҖмқҳ мӮ°лҰјмқ„ нҡЁмңЁм ҒмңјлЎң кҙҖлҰ¬н•ҳкё° мң„н•ҙм„ңлҠ” мһ„분 лӢЁмң„(Stand level)мқҳ мЎ°л°©м Ғ м—°лЈҢкҙҖлҰ¬ мІҙкі„лҘј л„ҳм–ҙ м ңкұ° мһ„лӘ© к№Ңм§Җ м„ лі„к°ҖлҠҘн•ң мҲҳмӨҖмқё мҶҢк·ңлӘЁ м •л°Җ м—°лЈҢкҙҖлҰ¬мІҙкі„ л§Ҳл Ёмқҙ мҡ”кө¬лҗңлӢӨ(Cruz et al., 2004; Cruz et al., 2005). мҶҢк·ңлӘЁ к°ңмІҙлӘ© лӢЁмң„(Tree level)мқҳ м •л°Җ분м„қмқ„ мӢӨнҳ„н•ҳкё° мң„н•ҙм„ңлҠ” лӢӨм–‘н•ң нҳ•нғңмқҳ мҳҒмғҒмқ„ мқҙмҡ©н•ҳм—¬ мҶҗмүҪкІҢ мһ„분л°ҖлҸ„(Stand density), мҲҳкі (Tree height), нқүкі м§ҒкІҪ(Diameter at breast height) л“ұ мӮ°лҰјм •ліҙлҘј м¶”м •н• мҲҳ мһҲм–ҙм•ј н•ҳл©°, мқҙлҹ¬н•ң мӮ°лҰјм •ліҙлЎң мӮ°лҰј лӮҙ нғҲ мҲҳ мһҲлҠ” л¬јм§Ҳмқҳ м–‘кіј нҠ№м„ұмқ„ нҢҢм•…н•ҳлҠ” кё°мҲ мқҙ к°ңл°ңлҗҳм–ҙ м•ј н•ңлӢӨ(Chen et al., 2006; Kwak et al., 2007; Strigul, 2012).
мӮ°лҰј 분야м—җм„ңлҠ” мң„м„ұмҳҒмғҒ, н•ӯкіөмӮ¬м§„, LiDAR л“ұмқ„ мқҙмҡ© н•ҳм—¬ мӮ°лҰјмһҗмӣҗ м •ліҙлҘј к°„м ‘ м¶”м •н•ҳлҠ” мӣҗкІ©нғҗмӮ¬ кё°мҲ мқҙ нҷңмҡ© лҗҳкі мһҲлӢӨ(Hyyppa et al., 2001; Andersen et al., 2004). мң„м„ұкіј н•ӯкіөкё°м—җл§Ң мқҳмЎҙн•ҳлҚҳ мҳҒмғҒ м •ліҙ мҲҳ집мқҖ мөңк·ј л“ңлЎ (UAV) кё°мҲ мқҙ л°ңм „н•Ём—җ л”°лқј мһҗмң мһҗмһ¬лЎң мҳҒмғҒ м •ліҙлҘј м·Ёл“қн• мҲҳ мһҲлҠ” мІҙкі„к°Җ л§Ҳл Ёлҗҳм—ҲлӢӨ. л“ңлЎ мқҖ мӮ¬мҡ©мһҗк°Җ мүҪкІҢ мЎ°мў…н• мҲҳ мһҲмңјл©°, кё°мЎҙ н•ӯкіөмҳҒмғҒмқҙлӮҳ мң„м„ұмҳҒмғҒкіј лӢ¬лҰ¬ лҶ’мқҖ кі н•ҙмғҒлҸ„ мҳҒмғҒмқ„ м Җ비мҡ©мңјлЎң м–»мқ„ мҲҳ мһҲлҠ” мһҘм җмқҙ мһҲлӢӨ(Tian et al., 2017). кіјкұ°м—җлҠ” мҙ¬мҳҒ мҳҒмғҒмқ„ 분м„қм—җ нҷңмҡ©н•ҳл Өл©ҙ кі н’Ҳм§Ҳмқҳ м •нҷ•лҸ„ лҶ’мқҖ мқҙлҜём§Җ мғқм„ұмқҖ н•„мҲҳм ҒмқҙмҳҖлӢӨ(Dimitrios et al., 2016). к·ёлҹ¬лӮҳ мөңк·ј Structure from Motionм—җм„ң нҢҢмғқлҗң лӢӨмӨ‘ к°ҒлҸ„ мқҙлҜём§ҖлҘј 추м¶ңн•ҳлҠ” мҙҲкі н•ҙмғҒлҸ„ л””м§Җн„ё лӘЁлҚё кё°мҲ мқҙ л°ңм „н•Ём—җ л”°лқј мқјл°ҳ мҳҒмғҒмңјлЎңлҸ„ м–јл§Ҳл“ м§Җ м •ліҙлҘј к°Җкіөн•ҳкі л¶„м„қн• мҲҳ мһҲлҠ” мІҙкі„к°Җ л§Ҳл Ёлҗҳм—ҲлӢӨ(Fritz et al., 2013; James and Robson, 2012; Ota et al., 2015).
мөңк·ј л§ҺмқҖ м—°кө¬м§„мқҖ л“ңлЎ мҳҒмғҒмһҗлЈҢлҘј кё°л°ҳмңјлЎң мӢңкі„м—ҙ мӮ°лҰјкө¬мЎ° ліҖнҷ”, мһҘкё°лӘЁлӢҲн„°л§Ғ м—°кө¬мҷҖ нғ„мҶҢм ҖмһҘлҹү, мһ„лӘ©мһ¬м Ғ л°Ҹ мҲҳнҷ•лҹү м¶”м • л“ұм—җ мқҙмҡ©н•ҳкі мһҲмңјл©°, м—°кө¬ мҳҒм—ӯмқ„ м§ҖмҶҚм Ғмңј лЎң нҷ•лҢҖн•ҳкі мһҲлӢӨ(Diaz-Varela et al., 2014; Gini et al., 2014; Edson and Wing, 2011; Zarco-Tejada et al., 2014), мӮ°л¶Ҳ분야 м—җм„ңлҸ„ л“ңлЎ мқ„ мқҙмҡ©н•ң м—°кө¬к°Җ 추진лҗҳкі мһҲлӢӨ. л“ңлЎ мҳҒмғҒкіј мқёкіөм§ҖлҠҘн•ҷмҠөмқ„ мқҙмҡ©н•ң мӮ°л¶Ҳм—°лЈҢ лӘЁлӢҲн„°л§Ғ м—°кө¬к°Җ лҢҖн‘ңм Ғ мқҙл©°, м ңкұ°лӘ© кіөк°„ 분м„қ л°Ҹ м„ лі„ л“ұ мӮ°л¶Ҳн”јн•ҙм Җк°җмқ„ мң„н•ң мӮ°л¶Ҳм—°лЈҢкҙҖлҰ¬ мқҳмӮ¬кІ°м •мӢңмҠӨн…ң к°ңл°ң м—°кө¬к°Җ мқҙлЈЁм–ҙм§Җкі мһҲ лӢӨ(Cruz et al., 2002; David, 2010). н•ңнҺё, көӯлӮҙм—җм„ңлҠ” мӮ°лҰјкіө 간분м„қ, мҲҳ종분лҘҳ л“ұ мӮ°лҰјм •ліҙ мһҗлЈҢ кө¬м¶•мқ„ мң„н•ң кё°мҙҲм Ғмқё м—°кө¬лҠ” к°„н—җм ҒмңјлЎң мҲҳн–үлҗҳкі мһҲмңјлӮҳ(Lim et al., 2016; Park and Jang, 2018; Kim and Kwon, 2020), мӮ°л¶Ҳн•ҷ кҙҖм җм—җм„ң мҲҳн–үн•ң м—°кө¬лҠ” м „л¬ҙн•ң мӢӨм •мқҙлӢӨ.
ліё м—°кө¬м—җм„ңлҠ” л“ңлЎ м •мӮ¬мҳҒмғҒмқ„ нҷңмҡ©н•ҳм—¬ к°ңмІҙлӘ©мқ„ 분лҘҳ н•ҳкі мҲҳкі лҘј 추м¶ңн•ҳм—¬ 추м¶ңлҘ л°Ҹ м Ғн•©лҸ„лҘј нҸүк°Җн•ҳмҳҖлӢӨ. лҳҗн•ң, 추м¶ңлҗң мҲҳкі мҷҖ мҲҳкҙҖл©ҙм Ғм—җ л”°лҘё нқүкі м§ҒкІҪ м •ліҙлҘј мқҙмҡ©н•ҳм—¬ н•ҙлӢ№ мӮ°лҰј лӮҙм—җм„ң мӮ°л¶ҲлЎң мқён•ҙ нғҲ мҲҳ мһҲлҠ” к°Җм—°л¬јм§Ҳмқҳ м–‘мқ„ 분м„қн•ҳлҠ” л°©лІ•лЎ мқ„ м ңмӢңн•ҳкі мһҗ н•ңлӢӨ.
2. мһ¬лЈҢ л°Ҹ л°©лІ•
2.1 м—°кө¬лҢҖмғҒм§Җ
м—°кө¬лҢҖмғҒм§ҖлҠ” к°•мӣҗлҸ„ кі м„ұкө° мЈҪмҷ•л©ҙ мқјлҢҖ көӯмң лҰј лӮҙ мң„м№ҳ н•ң мҶҢлӮҳл¬ҙлҰјмңјлЎң 2000л…„ лҸҷн•ҙм•Ҳ мӮ°л¶Ҳн”јн•ҙ нӣ„ мҶҢлӮҳл¬ҙ мҲҳмў…мқ„ мЎ°лҰјн•ң м§Җм—ӯмқҙлӢӨ. мһ„л №мқҖ 24л…„мғқ в…ўмҳҒкёү мһ„분мңјлЎң нҸүк· нқүкі м§ҒкІҪ 14.0 cm, нҸүк· мҲҳкі 9.5 m, м§Җн•ҳкі 4.1 mмқҳ нҠ№м„ұмқ„ ліҙмқҙлҠ” мһ„분мқҙлӢӨ(Fig. 1).
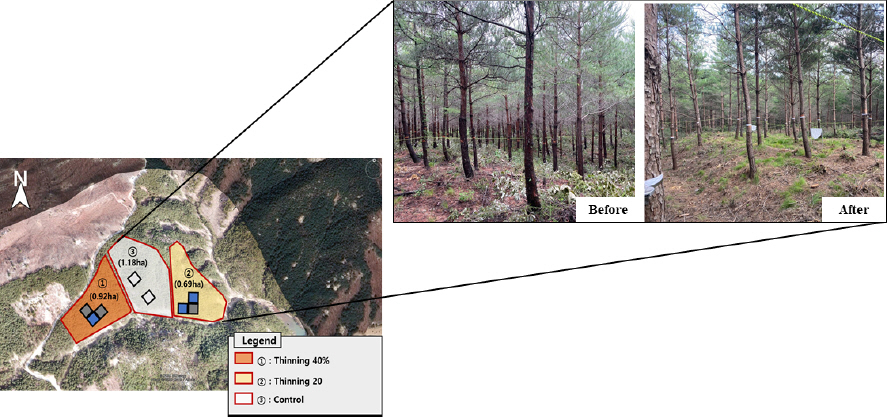
ліё мӢңн—ҳкө¬лҠ” мҲҳкҙҖнҷ” нҷ•мӮ° л°©м§ҖлҘј мң„н•ң м Ғм •мһ„분л°ҖлҸ„ кё°мӨҖ мңјлЎң мҲІк°Җкҫёкё°лҘј 진н–үн•ң мһ„분(к°„лІҢ 40%), лӘ©мһ¬мғқмӮ°мҡ© ліёмҲҳ лҢҖ비 кё°мӨҖм—җ мқҳн•ҙ мҲІк°Җкҫёкё°лҘј 진н–үн•ң мһ„분(к°„лІҢ 20%), мҲІк°Җ кҫёкё°лҘј 진н–үн•ҳм§Җ м•ҠмқҖ лҢҖмЎ°кө¬ мһ„분мңјлЎң лӮҳлҲ„м–ҙ к°Ғ 3л°ҳліөмңјлЎң мІҳлҰ¬н•ң мһ„분мқҙлӢӨ(KFS, 2012; 2016).
2.2 мһҗлЈҢмҲҳ집 л°Ҹ 분м„қл°©лІ•
2.2.1 л“ңлЎ мҙ¬мҳҒ л°Ҹ мҳҒмғҒмІҳлҰ¬ л°©лІ•
DJIмӮ¬м—җм„ң к°ңл°ңн•ң Mavic Pro мһҘ비м—җ Hasselblad L1D-20c м№ҙл©”лқј(2,000л§Ң Pixel)лҘј нғ‘мһ¬н•ң л“ңлЎ мқ„ мқҙмҡ©н•ҳм—¬ 2021л…„ 3мӣ” 20мқјм—җ лҢҖмғҒм§ҖлҘј мҙ¬мҳҒн•ҳмҳҖлӢӨ. мҙ¬мҳҒкі лҸ„лҠ” н•ҙмғҒлҸ„мҷҖ мЈј ліҖ м§Җнҳ•м§Җл¬ј нҠ№м„ұмқ„ кі л Өн•ҳм—¬ 200 mлЎң м„Өм •н•ҳмҳҖмңјл©°, лӮҙмӨ‘ мІ©мңЁ(End lap)кіј мҳҶмӨ‘мІ©мңЁ(Side lap)мқ„ 80% мқҙмғҒмңјлЎң м„Өм • 비н–үн•ҳмҳҖлӢӨ. мҳҒмғҒмҙ¬мҳҒлІ”мң„лҠ” мӢӨм ң м—°кө¬лҢҖмғҒм§Җ л©ҙм Ғ 3.70 haліҙлӢӨ л„“мқҖ 37.93 haлЎң м„Өм •н•ҳм—¬ к°ҖмһҘмһҗлҰ¬мқҳ мҷңкіЎм—җ мқҳн•ң 분м„қмҳӨлҘҳлҘј л°©м§Җн•ҳмҳҖмңјл©°, DJIмӮ¬м—җм„ң м ңкіөн•ҳлҠ” DJI GO м•ұ мқ„ мқҙмҡ©н•ҳм—¬ мһҗлҸҷ비н–үлӘЁл“ңлЎң мҙ¬мҳҒн•ҳмҳҖлӢӨ.
Pix 4D Mapper мҶҢн”„нҠёмӣЁм–ҙлҘј мқҙмҡ©н•ҳм—¬ мҙ¬мҳҒ кіјм •м—җм„ң л°ңмғқн•ң л“ңлЎ мқҳ нқ”л“ӨлҰј, м№ҙл©”лқјмқҳ к°ҒлҸ„, л ҢмҰҲмқҳ мҷңкіЎ л“ұ л¶Ҳмҷ„м „ мҡ”мҶҢл“Өм—җ лҢҖн•ң нӣ„мІҳлҰ¬лҘј 진н–үн•ҳмҳҖлӢӨ(Table 1). GNSS/IMU м •ліҙлҘј мқҙмҡ©н•ҳм—¬ мҳҒмғҒмқҳ мң„м№ҳ, кі лҸ„ л“ұ мң„м№ҳліҙм •мқ„ мҲҳн–үн•ң мһҗлЈҢлҘј кё°л°ҳмңјлЎң мҳҒмғҒмқ„ м •н•©н•ҳмҳҖмңјл©°, мқҙнӣ„ Point CloudлҘј нҶөн•ҙ мҲҳм№ҳн‘ңл©ҙлӘЁлҚё(Digital Surface Model, DSM)лҘј мғқм„ұн•ҳ мҳҖлӢӨ. DSMмқҖ мӨ‘мІ©мӮ¬м§„мқ„ мһҗлҸҷм ҒмңјлЎң л§Өм№ӯмӢңмјң м–»мқҖ кІ°кіјлЎң л§Өм№ӯмҳӨлҘҳм—җ лҢҖн•ң ліҙм •мқ„ мң„н•ҙ н•„н„°л§Ғмқ„ мҲҳн–үн•ҳмҳҖлӢӨ(Chang et al., 2006). мІҳлҰ¬кіјм •м—җм„ңмқҳ мҳӨлҘҳмҷҖ мҲҳкҙҖмёө мҳҒм—ӯмқҳ кІҪкі„лҘј л¶Җл“ңлҹҪкІҢ ліҙм •н•ҳкё° мң„н•ҙ Noise filteringкіј Smoothing filtering мқ„ мӢӨмӢңн•ҳмҳҖлӢӨ. лҳҗн•ң мқёкіөкө¬мЎ°л¬јкіј мҲҳлӘ© л“ұ м§Җн‘ңн”јліөл¬јм—җ лҢҖн•ң лҶ’мқҙлҘј м ңкұ°н•ң мҲңмҲҳ кі лҸ„лӘЁнҳ•мқё мҲҳм№ҳм§Җнҳ•н‘ңкі лӘЁлҚё(Digital Terrain Model, DTM)мқ„ 추м¶ңн•ҳкё° мң„н•ҙ м—ӯкұ°лҰ¬к°ҖмӨ‘лІ•(Inverse distance weighted)лҘј мқҙмҡ©н•ҙ ліҙк°„мһ‘м—…мқ„ 진н–үн•ҳмҳҖлӢӨ.
2.2.2 мӮ°лҰјнҳ„мһҘмЎ°мӮ¬
лҢҖнҳ•мӮ°л¶Ҳл°©м§Җ мҶҢлӮҳл¬ҙмҲІ мӢңн—ҳкө¬ лӮҙ м„Өм№ҳлҗң к°„лІҢк°•лҸ„(лҢҖмЎ° кө¬, к°„лІҢ 40%, к°„лІҢ 20%) л°©нҳ•кө¬лҘј лҢҖмғҒмңјлЎң мӮ°лҰјнҳ„мһҘмЎ°мӮ¬ лҘј мҲҳн–үн•ҳмҳҖлӢӨ. 20 m Г— 20 m нҒ¬кё°мқҳ л°©нҳ•кө¬ лӮҙ мғқмңЎн•ҳкі мһҲлҠ” нқүкі м§ҒкІҪ 6 cm мқҙмғҒ к°ңмІҙлӘ©мқ„ лҢҖмғҒмңјлЎң Vertex в…ЈлҘј мқҙмҡ©н•ҳм—¬ мҲҳкі лҘј мёЎм •н•ҳмҳҖмңјл©°, нқүкі м§ҒкІҪ мёЎм •мқҖ м§ҒкІҪн…Ңмқҙ н”„лҘј мқҙмҡ©н•ҳмҳҖлӢӨ. к°ңмІҙлӘ©мқҳ мң„м№ҳм •ліҙлҠ” мӮ°лҰј лӮҙ мқёкіөмң„м„ұкіј GPSк°„мқҳ мҶЎмӢ мқҙ мӣҗнҷңн•ҳм§Җ м•ҠмқҖ м җмқ„ к°җм•Ҳн•ҳм—¬ н‘ңмӨҖм§Җ лӮҙ мӨ‘мӢ¬м—җ мң„м№ҳн•ҳлҠ” к°ңмІҙлӘ©(мӨ‘мӢ¬м җ)мқ„ кё°мӨҖмңјлЎң кұ°лҰ¬мҷҖ л°©мң„к°Ғ мқ„ мёЎм •н•ҳм—¬ мң„м№ҳм •ліҙлҘј м¶”м •н•ҳмҳҖлӢӨ. к·ё нӣ„ нҳ„мһҘм—җм„ң м–»мқҖ мӢӨм ң мһ„лӘ©мң„м№ҳм •ліҙмҷҖ мҳҒмғҒмң„м№ҳм •ліҙлҘј мқјм№ҳмӢңнӮӨлҠ” нӣ„мІҳлҰ¬ мһ‘м—…мқ„ мҲҳн–үн•ҳмҳҖлӢӨ.
2.2.3 к°ңмІҙлӘ© л¶„н• л°Ҹ мҲҳкі м¶”м¶ң л°©лІ•
2.2.3.1 к°қмІҙм§Җн–Ҙ мҳҒмғҒл¶„н• (Object-oriented image seg-mentation)
мҳҒмғҒ분м„қмқ„ мң„н•ҙ System for Automated Geoscientific Alaysis (SAGA) н”„лЎңк·ёлһЁкіј мҳӨн”ҲмҶҢмҠӨмқё QGIS 3.20мқ„ мқҙмҡ© н•ҳмҳҖлӢӨ. ліё м—°кө¬м—җм„ңлҠ” м Җн•ҙмғҒлҸ„ мҳҒмғҒм—җ мқҙмҡ©лҗҳлҠ” н”Ҫм…Җкё°л°ҳ мҳҒмғҒ분м„қмқҙ м•„лӢҢ к°қмІҙкё°л°ҳ мҳҒмғҒ분м„қ кё°мҲ мқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ. мӮ¬мҡ©н•ң к°қмІҙм§Җн–ҘмҳҒмғҒл¶„н• мқҙлһҖ мҳҒмғҒл¶„н• мӢң 분кҙ‘м •ліҙмҷҖ кіөк°„ м •ліҙлҘј лҸҷмӢңм—җ мқҙмҡ©н•ҳм—¬ лӘЁм–‘мқҙлӮҳ 분кҙ‘м •ліҙк°Җ к· мқјн•ң мҳҒм—ӯмқё мҳҒмғҒк°қмІҙлҘј л§Ңл“ңлҠ” кё°мҲ лЎңм„ң мҳҒмғҒл¶„н• (Image segmentation) м—җ кё°мҙҲн•ҳм—¬ кіөк°„н•ҙмғҒлҸ„к°Җ лҶ’мқҖ мҳҒмғҒ분м„қм—җ м„ нҳёлҗҳкі мһҲлӢӨ (Carleer et al., 2005; Edson and Wing, 2011).
к°қмІҙм§Җн–Ҙ мҳҒмғҒл¶„н• мқҖ л¶„н• кіјм •м—җм„ң Bandмқҳ нҒ¬кё°, кіөк°„нҠ№ м„ұ, кіөк°„мң„м№ҳ, мһ„кі„к°’м—җ лҢҖн•ң к°ҖмӨ‘м№ҳм—җ л”°лқј 분лҘҳ м •нҷ•лҸ„к°Җ лӢ¬лқјм§Ҳ мҲҳ мһҲкё° л•Ңл¬ём—җ(Lee et al., 2007), к°ңмІҙлӘ© 추м¶ңм—җ м Ғн•©н•ң мҲҳм№ҳ м„Өм •мқ„ мң„н•ң л°ҳліө 분м„қмқ„ мӢӨмӢңн•ҳмҳҖлӢӨ. к°қмІҙ л¶„н• мқ„ мӢӨмӢңн•ң мҳҒмғҒмқҖ RGB л°ҙл“ңнҠ№м„ұмқ„ кі л Өн•ҳм—¬ Red л°ҙл“ң лҠ” мһ„лӘ©кө¬м—ӯ, Blue л°ҙл“ңлҠ” м§Җл©ҙкө¬м—ӯ, Gray л°ҙл“ңлҠ” к·ёлҰјмһҗкө¬м—ӯ мңјлЎң лӮҳлҲ„м—ҲлӢӨ. м§Җл©ҙмң„м—җ мҢ“мқё лҲҲмқҖ 분м„қмһҗ нҢҗлӢЁн•ҳм—җ н‘ңліёк°’ мқ„ м§Ғм ‘ м§Җм •н•ҳм—¬ 분лҘҳн•ҳмҳҖлӢӨ. мөңмў…м ҒмңјлЎң к°Ғк°Ғмқҳ мҳҒмғҒм—җм„ң н‘ңліёкіј 피분лҘҳ лҢҖмғҒм—җ лҢҖн•ң н‘ңліёк°’мқ„ м„Өм •н•ҳмҳҖмңјл©°, н‘ңліёмқҳ к°’кіј мң мӮ¬н•ң нҠ№м§•мқ„ к°–лҠ” к°ңмІҙл“Өмқ„ мһҗлҸҷм„ нғқн•ҳкі , к·ёлЈ№нҷ”н•ҳ лҠ” к°җлҸ…분лҘҳ(Supervised classfication)лҘј мӢӨмӢңн•ҳмҳҖлӢӨ.
2.2.3.2 к°ңмІҙлӘ© мҲҳкі м¶”м • л°©лІ•
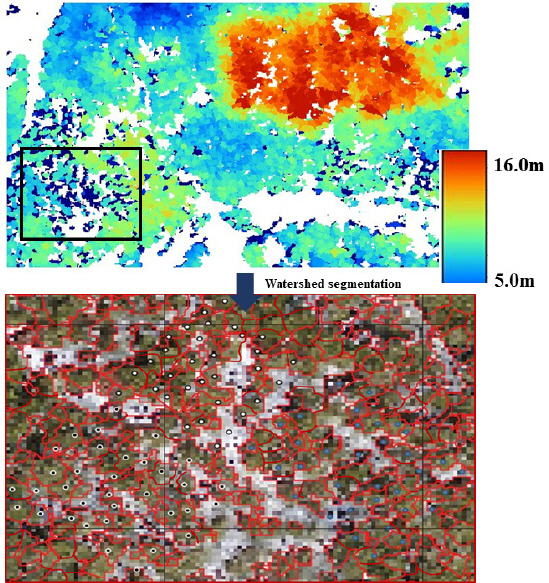
DSMкіј DTMмқҳ мҲҳм№ҳм •ліҙ м°ЁмқҙлҘј нҶөн•ҙ м§Җл©ҙм—җ мЎҙмһ¬н•ҳлҠ” к°қмІҙмқҳ лҶ’мқҙк°’мқ„ мқҳлҜён•ҳлҠ” мҲҳкі лӘЁлҚё(Digital Crown Height Model, DCHM)мқ„ 추м¶ңн•ҳмҳҖлӢӨ(Cho and Kim, 2010). мқҙнӣ„ к°қмІҙкё°л°ҳ мҳҒмғҒ분м„қмқ„ нҶөн•ҙ л¶„н• лҗң нҸҙлҰ¬кіӨкіј DCHMмқ„ мӨ‘мІ©мӢң мјң лҶ’мқҙ к°’мқ„ к°ңмІҙлӘ©м—җ м Ғмҡ©н•ҳмҳҖлӢӨ. мғқм„ұлҗң мҳҒмғҒмқ„ Watershed segmentation кё°лҠҘмқ„ мқҙмҡ©н•ҳм—¬ к°ңмІҙлӘ© лӢЁмң„лЎң л¶„н• н•ҳмҳҖмңјл©°, кІ°кіјл¬јмқ„ мқҙмҡ©н•ҙ к°„лІҢк°•лҸ„лі„ к°ңмІҙлӘ© 추м¶ңлҘ (Extaction rate) кіј 추м¶ңм •нҷ•лҸ„(Extraction accuracy)лҘј 분м„қн•ҳмҳҖлӢӨ.
2.2.4 нқүкі м§ҒкІҪ м¶”м • л°Ҹ мӮ°л¶Ҳм—°лЈҢлҹү м¶”м •л°©лІ•
мӮ°л¶Ҳм—°лЈҢлҹүмқ„ м¶”м •н•ҳкё° мң„н•ҙ мҲҳкҙҖл©ҙм Ғмқ„ ліҖмҲҳлЎң н•ҳлҠ” нқүкі м§ҒкІҪ м¶”м •мӢқмқ„ к°ңл°ңн•ҳмҳҖлӢӨ. мҲҳкҙҖл©ҙм ҒмқҖ к°қмІҙкё°л°ҳ мҳҒмғҒ 분м„қмқ„ нҶөн•ҙ мһ„лӘ©мқҳ мҲҳкҙҖмҳҒм—ӯмқ„ 추м¶ңн•ң кІ°кіјк°’м—җ лӢЁл©ҙм Ғмқ„ мӮ°м¶ңн•ҳм—¬ м¶”м •н•ҳмҳҖлӢӨ. мҲҳкҙҖл©ҙм Ғкіј нқүкі м§ҒкІҪкіјмқҳ мғҒкҙҖкҙҖкі„ 분м„қмқ„ мң„н•ҙ н”јм–ҙмҠЁ мғҒкҙҖкҙҖкі„ л°©лІ•мқ„ мқҙмҡ©н•ҳм—¬ л‘җ ліҖмҲҳ мӮ¬мқҙмқҳ мң мқҳмҲҳмӨҖмқ„ мӮ°м¶ңн•ҳмҳҖлӢӨ.
Kim (2015)мқҙ м—°кө¬лҘј нҶөн•ҙ к°ңл°ңн•ң нқүкі м§ҒкІҪмқ„ ліҖмҲҳлЎң н•ҳлҠ” мҶҢлӮҳл¬ҙ мӮ°л¶Ҳм—°лЈҢлҹү лҢҖмҲҳнҡҢк·ҖмӢқ(Eq. (2))м—җм„ң ОІ0 :-2.380, ОІ1:1.637мқ„ мқҙмҡ©н•ҳм—¬ мӢӨм ң нҳ„мһҘмЎ°мӮ¬лҘј нҶөн•ҙ м¶”м •лҗң мӮ°л¶Ҳм—° лЈҢлҹүкіј мҳҒмғҒ분м„қмқ„ нҶөн•ҙ м¶”м •лҗң мӮ°л¶Ҳм—°лЈҢлҹүк°„мқҳ м°ЁмқҙлҘј 비көҗвӢ…분м„қн•ҳмҳҖлӢӨ.
3. кІ° кіј
3.1 м •мӮ¬мҳҒмғҒкіј мҲҳкі лӘЁлҚё 추м¶ң
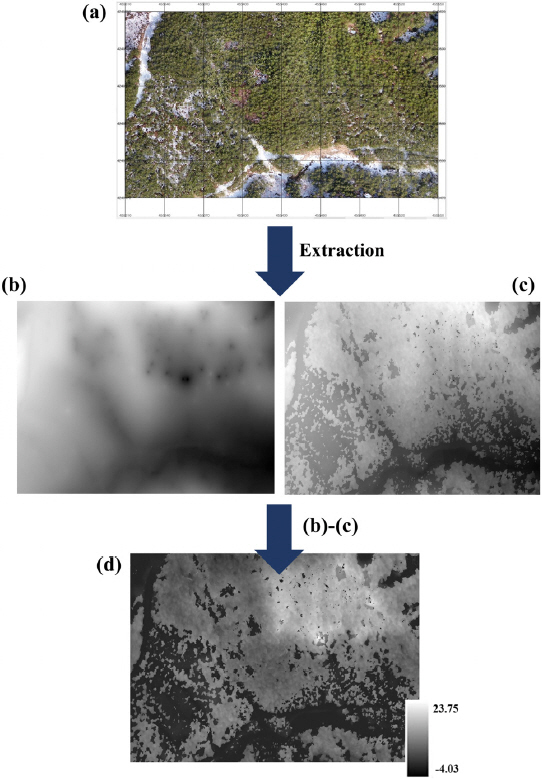
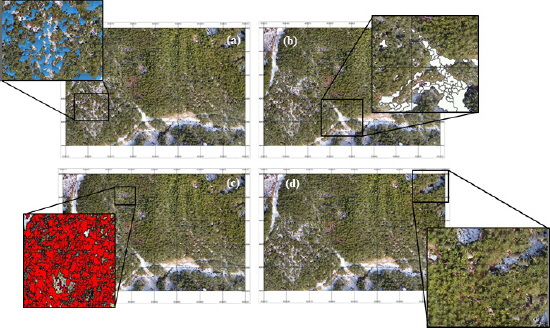
л“ңлЎ м—җ нғ‘мһ¬лҗң GNSS/IMU м„јм„ңлҘј нҶөн•ҙ м·Ёл“қн•ң мҷёл¶Җн‘ңм • мҡ”мҶҢмҷҖ нҠ№м§•м җ 추м¶ң л°©мӢқмқ„ мқҙмҡ©н•ҳм—¬ мҳҒмғҒмқ„ м •н•©н•ҳмҳҖлӢӨ. м •н•©кіјм •м—җм„ң лӮұмһҘл§ҲлӢӨ н•ҙмғҒлҸ„к°Җ м°Ёмқҙк°Җ л°ңмғқн•ҳлҠ”лҚ°, мҙқ 1,227л§Ө мҙ¬мҳҒ мӮ¬м§„ мӨ‘ н•ҙмғҒлҸ„к°Җ лӮ®м•„ ліҙм •мқҙ лҗҳм§Җ м•ҠмқҖ 48л§Өмқҳ мӮ¬м§„мқ„ 비нҷңм„ұнҷ” мІҳлҰ¬н•ҳкі , лӮҙл¶Җн‘ңм •мҡ”мҶҢм—җ мқҳн•ҙ ліҙм •лҗң 1,179л§Өл§Ңмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ. мғқм„ұлҗң мҳҒмғҒм—җм„ң ліё м—°кө¬лҢҖ мғҒм§Җк°Җ мң„м№ҳн•ң л¶Җ분мқ„ мһ„мқҳмқҳ Shpfileмқ„ мғқм„ұн•ҳм—¬ лі„лҸ„лЎң 추м¶ңн•ҳмҳҖлӢӨ. 추м¶ңн•ң м •мӮ¬мҳҒмғҒмқҳ л©ҙм ҒмқҖ м•Ҫ 3.7 haмқҙм—Ҳмңјл©° м•Ҫ 2.42 cmмқҳ кі н•ҙмғҒлҸ„ мҳҒмғҒмқ„ нҡҚл“қн• мҲҳ мһҲм—ҲлӢӨ.
DSMмқҳ н•ҙмғҒлҸ„лҠ” 2.42 cmкёү мқҙм—Ҳкі , DTMмқҳ н•ҙмғҒлҸ„лҠ” м•Ҫ 30 cmкёүмқҙ 추м¶ңлҗҳм—ҲлӢӨ. DSMкіј DTMмқҳ м°ЁлҘј мқҙмҡ©н•ҳм—¬ мҲҳкҙҖл¶Җ лҶ’мқҙм—җ лҢҖн•ң лӘЁлҚёмқё DCHMмқ„ мғқм„ұн•ң кІ°кіј, мҳҒмғҒм—җм„ң к°ҖмһҘ л°қмқҖ мҳҒм—ӯмқҖ 23.75 m, к°ҖмһҘ м–ҙл‘җмҡҙ мҳҒм—ӯмқҖ -4.03 mмқҙм—Ҳ лӢӨ. DCHMмқҖ м§Җл©ҙ мң„ кө¬мЎ°л¬јм—җ лҢҖн•ң лҶ’мқҙлҘј лӮҳнғҖлӮҙкё° л•Ңл¬ём—җ мқҙлЎ м ҒмңјлЎң 0 мқҙн•ҳмқҳ мҲҳм№ҳлҘј к°Җм§Ҳ мҲҳ м—ҶмңјлӮҳ, ліё м—°кө¬м—җм„ңлҠ” -4.03 mк№Ңм§Җ мҳӨм°Ёк°Җ л°ңмғқн•ҳмҳҖлӢӨ. мқҙлҹ° кІ°кіјлҠ” DTMмқ„ мғқм„ұн• л•Ң Point Cloudк°Җ м—ҶлҠ” мһ„мқҳмқҳ м§Җм җм—җ лҢҖн•ң к°’мқ„ мҳҲмёЎн• л•Ң л°ңмғқн•ң мҳӨм°ЁлЎң нҢҗлӢЁлҗңлӢӨ.
분м„қмқ„ нҶөн•ҙ 추м¶ңн•ң м •мӮ¬мҳҒмғҒ, DSM, DTM, DCHM лӘЁлҚё мқҖ лӢӨмқҢкіј к°ҷлӢӨ(Fig. 2).
3.2 к°ңмІҙлӘ© л¶„н• л°Ҹ мҲҳкі м¶”м¶ң
3.2.1 к°қмІҙм§Җн–Ҙ мҳҒмғҒл¶„н• кІ°кіј
Grays мҳҒмғҒм—җм„ң 140 лҜёл§ҢмңјлЎң лӮҳнғҖлӮң к°қмІҙлҠ” вҖҳк·ёлҰјмһҗвҖҷ, Red мҳҒмғҒм—җм„ң 140 мқҙмғҒ 210 мқҙн•ҳлЎң лӮҳнғҖлӮң к°қмІҙлҠ” вҖҳмһ„лӘ©вҖҷ, Blue мҳҒмғҒм—җм„ң 165 мқҙмғҒмңјлЎң лӮҳнғҖлӮң к°қмІҙлҠ” нҶ м–‘ лҳҗлҠ” м•”м„қ мқ„ мқҳлҜён•ҳлҠ” вҖҳкё°нғҖм§Җм—ӯвҖҷмқҙлқјкі м„Өм •н•ҳмҳҖлӢӨ. м§Җн‘ңл©ҙ мң„м—җ мҢ“여진 лҲҲмқҖ н‘ңліёк°’мқ„ м§Ғм ‘ л¶Җм—¬н•ҳмҳҖмңјл©°, к°Ғк°Ғмқҳ мҳҒмғҒм—җ лҢҖн•ң кІ°кіјл¬јмқ„ мғқм„ұн•ҳмҳҖлӢӨ(Fig. 3).
к°қмІҙ분лҘҳлҗң мҳҒмғҒмһҗлЈҢм—җм„ң к·ёлҰјмһҗмҷҖ кё°нғҖм§Җм—ӯмқ„ м ңкұ°н•ҳ м—¬ мөңмў…м ҒмңјлЎң к°ңмІҙлӘ©мқ„ л¶„н• н• мһ„лӘ©м§Җм—ӯмқ„ мғқм„ұн•ҳмҳҖлӢӨ(Fig. 4). мғқм„ұлҗң мһ„лӘ©м§Җм—ӯ мҳҒмғҒкіј DCHM мһҗлЈҢлҘј мӨ‘мІ©мӢңнӮЁ нӣ„ лҶ’мқҙм—җ лҢҖн•ң мҶҚм„ұм •ліҙлҘј мһ…л Ҙн•ҳкі , Watershed segmentation algorithmмқ„ мқҙмҡ©н•ҳм—¬ мөңмў…м ҒмңјлЎң к°ңмІҙлӘ© лӢЁмң„лЎң л¶„н• н•ҳмҳҖ лӢӨ. н•ҙлӢ№ мһ„분 лӮҙ нҸүк· мҲҳкі (9.5 m)ліҙлӢӨ лӮ®мқ„ кІҪмҡ° кҙҖлӘ©, мҲҳк°„ л“ұмңјлЎң мҳӨмқёмӢқн•ҳм—¬ мҳҒмғҒ분лҘҳ м •нҷ•лҸ„к°Җ лӮ®м•„м§Ҳ мҲҳ мһҲкё° л•Ңл¬ём—җ мҲҳкі лҶ’мқҙ 5 m мқҙн•ҳлҠ” мһ„мқҳлЎң м ңкұ° н•ҳмҳҖлӢӨ.
3.2.2 к°„лІҢк°•лҸ„м—җ л”°лҘё мҲҳкі м¶”м¶ңкІ°кіј
к°„лІҢк°•лҸ„м—җ л”°лқј мӢӨм ң нҳ„мһҘмЎ°мӮ¬мҷҖ мҳҒмғҒлӮҙ мҲҳкі м¶”м¶ң кІ°кіј лҘј 비көҗн•ң кІ°кіјлҠ” лӢӨмқҢкіј к°ҷлӢӨ(Table 2).
TableВ 2
Tree Extraction and Tree Height Extraction Results According to Thinning type
лҢҖмЎ°кө¬мқҳ кІҪмҡ° мӢӨм ң к°ңмІҙлӘ© ліёмҲҳлҠ” 83ліёмқҙм—ҲмңјлӮҳ, мҳҒмғҒ분 м„қмқ„ нҶөн•ҙ 추м¶ңн•ң к°ңмІҙлӘ© 52ліёмңјлЎң 추м¶ңмңЁмқҖ 63%, 추м¶ңм •нҷ• лҸ„лҠ” м•Ҫ 58% мҲҳмӨҖмқҙм—ҲлӢӨ. к°„лІҢ 20% мӢңн—ҳкө¬мқҳ мӢӨм ң к°ңмІҙлӘ© ліёмҲҳлҠ” 52ліё, мҳҒмғҒ분м„қмқ„ нҶөн•ҙ 추м¶ңн•ң к°ңмІҙлӘ©мқҖ 53.3ліёмңјлЎң 107%мқҳ кіјлҢҖм¶”м •лҗҳм—Ҳмңјл©°, 85% мҲҳмӨҖмқҳ 추м¶ңм •нҷ•лҸ„лҘј ліҙмҳҖ лӢӨ. к°„лІҢ 40% мӢңн—ҳкө¬мқҳ мӢӨм ң к°ңмІҙлӘ© ліёмҲҳлҠ” 33.3ліё, мҳҒмғҒ분м„қ мқ„ нҶөн•ҙ 추м¶ңн•ң к°ңмІҙлӘ©мқҖ 33.7ліёмңјлЎң 추м¶ңм •нҷ•лҸ„лҠ” 95%мқё лҶ’мқҖ мҲҳмӨҖмқ„ ліҙм—¬ н•ҙлӢ№ кіөк°„ лӮҙ мһ„лӘ©мқҙ л„“кІҢ 분нҸ¬н• мҲҳлЎқ 추м¶ң м •нҷ•лҸ„к°Җ лҶ’м•„м§ҖлҠ” кІҪн–Ҙмқ„ ліҙмҳҖлӢӨ. мқјл°ҳм ҒмңјлЎң мӮ°лҰјкҙҖ лҰ¬к°Җ мҲҳн–үлҗҳм§Җ м•ҠмқҖ мһ„분м—җм„ңлҠ” л“ңлЎ мҳҒмғҒ лӮҙ к°ңмІҙлӘ©мқ„ м„ лі„ н•ҳлҠ” кІғмқҙ м–ҙл Өмҡҙ кІғмңјлЎң м•Ңл Өм ё мһҲмңјлӮҳ(Diaz-Varela et al., 2015), к°„лІҢмқҙ мӢңн–үлҗң мӢңн—ҳкө¬м—җм„ңлҠ” м•Ҫ 85% мқҙмғҒ мҲҳмӨҖмқҳ к°ңмІҙлӘ©мқ„ 추м¶ңн• мҲҳ мһҲлҠ” к°ҖлҠҘм„ұмқ„ ліҙм—¬мЈјм—ҲлӢӨ. лӢӨл§Ң к°„лІҢмқҙ мӢңн–үлҗң мӢңн—ҳкө¬м—җм„ң кіјлҢҖ추м¶ңмңЁмқ„ ліҙмҳҖлҠ”лҚ°, мқҙлҠ” мҳҒмғҒл¶„н• лӢЁкі„м—җм„ң мҲҳкҙҖмӨ‘мІ©лҘ мқҙ лӮ®мқҢмңјлЎң мқён•ҙ к·ёлҰјмһҗмҳҒм—ӯ, кҙҖлӘ©мёө л“ұ кё°нғҖмҳҒм—ӯм—җ лҢҖн•ң к°ңмІҙлӘ© мӢқлі„мқҙ мҳӨмқёмӢқлҗң кІғмңјлЎң ліҙмқёлӢӨ (Paproki et al., 2012; Song, 2020). 추нӣ„ м…ҖнҒ¬кё° мЎ°м Ҳ л“ұмқ„ нҶөн•ҙ мҲҳкҙҖмӨ‘мІ©лҘ мқ„ мҳ¬лҰ°лӢӨл©ҙ м •нҷ•лҸ„к°Җ лҶ’мқҖ к°ңмІҙлӘ© мҲҳкі м¶”м¶ңмқҙ к°ҖлҠҘн• кІғмңјлЎң ліҙмқёлӢӨ.
к°„лІҢ к°•лҸ„м—җ л”°лҘё к°ңмІҙлӘ©мқҳ мҲҳкі лҘј 추м¶ңн•ң кІ°кіј, лҢҖмЎ°кө¬мқҳ кІҪмҡ° мҳҒмғҒм—җм„ң 추м¶ңн•ң мҲҳкі к°Җ 6.90 mлЎң нҳ„мһҘм—җм„ң м§Ғм ‘ мёЎм • н•ң мҲҳкі 8.92 mліҙлӢӨ м•Ҫ 2.02 m лӮ®кІҢ м¶”м •лҗҳм—ҲлӢӨ. к°„лІҢ 20% мӢңн—ҳкө¬лҠ” мҳҒмғҒм—җм„ң 추м¶ңн•ң мҲҳкі мқё 7.97 mмқҙ нҳ„мһҘм—җм„ң м§Ғм ‘ мёЎм •н•ң мҲҳкі к°’мқё 9.08 mліҙлӢӨ м•Ҫ 1.12 m лӮ®кІҢ м¶”м •лҗҳм—Ҳмңјл©°, к°„лІҢ 40% мӢңн—ҳкө¬лҠ” нҳ„мһҘм—җм„ң м§Ғм ‘ мёЎм •н•ң мҲҳкі мҷҖ мҳҒмғҒ 추м¶ң мҲҳкі мқҳ м°Ёмқҙк°Җ 0.64 mм—җ л¶Ҳкіјн•ҳм—¬ к°„лІҢк°•лҸ„к°Җ лҶ’мқ„мҲҳ лЎқ мёЎм • мҳӨм°Ёк°Җ м җм°Ё мһ‘м•„м§ҖлҠ” кІҪн–Ҙмқ„ ліҙмҳҖлӢӨ. мҳҒмғҒ분лҘҳ кё°л°ҳн•ң мЈјмҡ” м№Ём—ҪмҲҳмў… мҲҳкі м¶”м¶ң кҙҖл Ё м„ н–үм—°кө¬кІ°кіјм—җм„ң м ңмӢңн•ң нҸүк· мҲҳкі мҳӨм°ЁлҠ” м•Ҫ 1.28 m~1.89 mмқҙмҳҖлӢӨ(Jan et al., 2017; Pabi et al., 2020; Kim et al., 2021). ліё м—°кө¬кІ°кіјмҷҖ 비көҗн•ҙ лҙӨмқ„ л•Ң, лҢҖмЎ°кө¬ мһ„분мқҖ кё°мЎҙ м„ н–үм—°кө¬кІ°кіј нҸүк· мҲҳкі мҳӨм°Ё лҢҖ비 мөңлҢҖ 157% лҶ’мқҖ мҳӨм°ЁмңЁмқ„ ліҙмқё л°ҳл©ҙ, к°„лІҢ 40% мӢңн—ҳкө¬лҠ” кё°мЎҙ м„ н–үм—°кө¬кІ°кіј лҢҖ비 мөңлҢҖ 50% лӮ®мқҖ мҳӨм°Ё мңЁмқ„ ліҙмҳҖлӢӨ.
3.3 нқүкі м§ҒкІҪ м¶”м • л°Ҹ мӮ°л¶Ҳм—°лЈҢлҹү м¶”м •
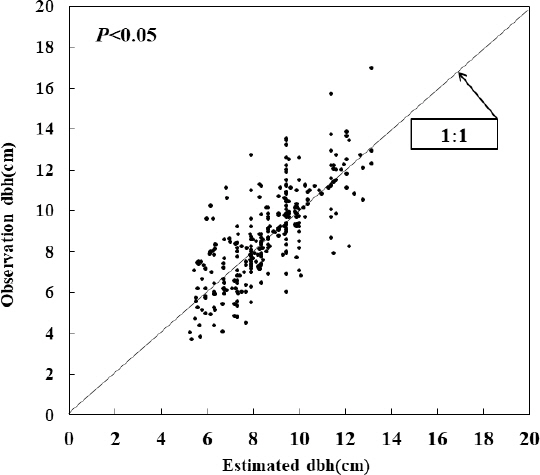
мҳҒмғҒм—җм„ң 분лҘҳлҗң мҲҳкҙҖл©ҙм Ғ м¶”м •м№ҳмҷҖ нқүкі м§ҒкІҪ кҙҖмёЎм№ҳк°„ мқҳ мғҒкҙҖм„ұмқ„ 분м„қн•ң кІ°кіј, мҲҳкҙҖл©ҙм Ғмқҙ л„“м–ҙм§ҲмҲҳлЎқ нқүкі м§ҒкІҪ лҳҗн•ң мҰқк°Җн•ҳлҠ” м–‘мқҳ мғҒкҙҖм„ұмқ„ ліҙмҳҖлӢӨ. л‘җ ліҖмҲҳ к°„мқҳ мғҒкҙҖ분м„қ мқ„ мӢӨмӢңн•ң кІ°кіј мң мқҳмҲҳмӨҖм—җм„ң лҶ’мқҖ мғҒкҙҖм„ұмқ„ ліҙмҳҖмңјл©° (P < 0.01), нқүкі м§ҒкІҪ-мҲҳкҙҖл©ҙм Ғ м¶”м •мӢқмқҖ м Ғн•©лҸ„(RВІ) 0.61мҲҳ мӨҖмқ„ ліҙмҳҖлӢӨ(Fig. 5).

нқүкі м§ҒкІҪ м¶”м •м№ҳмҷҖ мӢӨм ң мӮ°лҰјмЎ°мӮ¬лҘј нҶөн•ҙ м–»м–ҙ진 нқүкі м§Ғ кІҪ кҙҖмёЎм№ҳмқ„ мқҙмҡ©н•ҳм—¬ мӮ°л¶Ҳм—°лЈҢлҹүмқ„ 비көҗвӢ…분м„қн•ҳмҳҖлӢӨ. лЁј м Җ, м¶”м •лҗң нқүкі м§ҒкІҪмқҳ лІ”мң„лҠ” 11.82 cm~20.67 cmлЎң лӮҳнғҖлӮ¬ мңјл©°, кҙҖмёЎлҗң нқүкі м§ҒкІҪмқҖ 9.50 cm~24.12 cmмқҳ лІ”мң„лҘј ліҙмҳҖ лӢӨ. м¶”м •лҗң нқүкі м§ҒкІҪкіј кҙҖмёЎлҗң нқүкі м§ҒкІҪмқҖ мөңмҶҢ -4.22 cmм—җ м„ң мөңлҢҖ 5.02 cmк№Ңм§Җ м°Ёмқҙк°Җ мһҲм—Ҳмңјл©°, л‘җ 집лӢЁк°„ нҸүк· м ңкіұк·ј нҺём°ЁлҠ” 2.68 cmмқҙм—ҲлӢӨ(Fig. 6). кё°мЎҙ м„ н–үм—°кө¬кІ°кіјм—җ м„ңлҸ„ нҸүк· м ңкіұк·ј нҺём°ЁлҘј 2.05 cmлЎң м ңмӢңн•ң л°” мһҲм–ҙ ліё м—°кө¬мқҳ кІ°кіјмҷҖ мң мӮ¬н•ҳмҳҖлӢӨ(Koji, 1997).
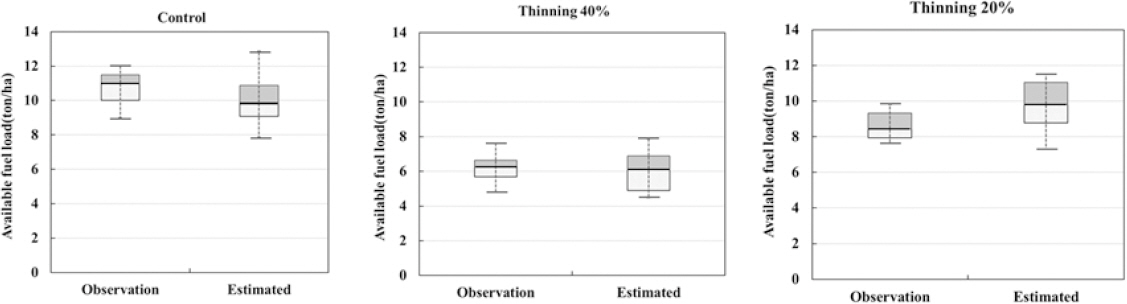
мӮ°л¶Ҳмқҙ л°ңмғқн–Ҳмқ„ л•Ң к°Җм—°л¬јм§ҲлЎң мһ‘мҡ©н•ҳлҠ” м—°мҶҢк°ҖлҠҘн•ң мҲҳкҙҖм—°лЈҢлҹүмқ„ 분м„қн•ң кІ°кіј, лҢҖмЎ°кө¬мқҳ кІҪмҡ° нқүкі м§ҒкІҪ м¶”м •мӢқ мқ„ мқҙмҡ©н•ң мҲҳкҙҖм—°лЈҢлҹүмқҖ 9.94 ton/haмңјлЎң кҙҖмёЎлҗң мҲҳкҙҖм—°лЈҢлҹү мқё 11.14 ton/haліҙлӢӨ м•Ҫ 1.20 ton/ha лӮ®кІҢ м¶”м •лҗҳм—ҲлӢӨ. к°„лІҢ 20% мӢңн—ҳкө¬лҠ” нқүкі м§ҒкІҪ м¶”м •мӢқмқ„ мқҙмҡ©н•ң мҲҳкҙҖм—°лЈҢлҹүмқҙ 9.01 ton/haмңјлЎң кҙҖмёЎлҗң мҲҳкҙҖм—°лЈҢлҹү 8.61 ton/haліҙлӢӨ м•Ҫ 0.40 ton/ha кіјлҢҖм№ҳлҘј ліҙмҳҖлӢӨ. к°„лІҢ 40% мӢңн—ҳкө¬лҠ” нқүкі м§ҒкІҪ м¶”м •мӢқмқ„ мқҙмҡ©н•ң мҲҳкҙҖм—°лЈҢлҹүмқҙ 5.70 ton/haмңјлЎң кҙҖмёЎлҗң мҲҳкҙҖм—°лЈҢлҹү 6.00 ton/haліҙлӢӨ м•Ҫ 0.20 ton/ha кіјмҶҢм№ҳлҘј ліҙмҳҖлӢӨ(Fig. 7). нқүкі м§ҒкІҪ м¶”м •мӢқмқ„ мқҙмҡ©н•ҳм—¬ м¶”м •н•ң мҲҳкҙҖм—°лЈҢлҹүкіј мӢӨм ң нҳ„мһҘмЎ°мӮ¬лҘј нҶөн•ҙ м¶”м •н•ң мҲҳкҙҖм—°лЈҢлҹүмқ„ 비көҗн•ң кІ°кіј, л‘җ м¶”м • мӢқ лӘЁл‘җ лҢҖмЎ°кө¬ мһ„분мқҙ к°„лІҢмқҙ мӢңн–үлҗң мӢңн—ҳкө¬м—җ 비н•ҙ мҲҳкҙҖм—° лЈҢлҹүмқҙ мғҒлҢҖм ҒмңјлЎң лҶ’м•ҳлӢӨ.
4. кІ° лЎ
ліё м—°кө¬м—җм„ңлҠ” л“ңлЎ м •мӮ¬мҳҒмғҒм •ліҙлЎң мһ„лӘ©к°ңмІҙмқҳ мҲҳкі мҷҖ нқүкі м§ҒкІҪ м •ліҙмҲҳ집мқ„ нҶөн•ҙ мӮ°л¶Ҳм—°лЈҢлҹүмқ„ м¶”м •н•ҳлҠ” л°©лІ•лЎ мқ„ м ңмӢңн•ҳкі мһҗ н•ҳмҳҖлӢӨ. м—°кө¬лҢҖмғҒм§ҖлҠ” к°•мӣҗлҸ„ кі м„ұкө°м—җ мң„м№ҳ н•ң лҢҖнҳ•мӮ°л¶Ҳл°©м§Җ мҶҢлӮҳл¬ҙмҲІ мӢңн—ҳкө¬лЎң к°„лІҢк°•лҸ„(лҢҖмЎ°кө¬, к°„лІҢ 20%, к°„лІҢ 40%) лі„ 3л°ҳліөмңјлЎң кө¬м„ұлҗҳм–ҙ мһҲлӢӨ. мӮ°лҰјм •ліҙмҲҳ집 мқ„ мң„н•ҙ RGB л°ҙл“ңнҠ№м„ұлі„ к°қмІҙкё°л°ҳ мҳҒмғҒкіј 3м°Ёмӣҗ мҲҳкі лӘЁлҚё мқ„ мӨ‘мІ©мӢңмјң к°ңмІҙлӘ©мқ„ м„ лі„ л°Ҹ 추м¶ңн•ҳмҳҖкі , к°ңмІҙлӘ©лі„ мҲҳкҙҖл©ҙ м Ғм—җ л”°лҘё нқүкі м§ҒкІҪмқ„ м¶”м •н•ҳмҳҖлӢӨ. к·ё кІ°кіј, к°„лІҢк°•лҸ„лі„ к°ңмІҙлӘ© 추м¶ңм •нҷ•мңЁмқҖ к°„лІҢ 40% мӢңн—ҳкө¬м—җм„ң 95%лЎң к°ҖмһҘ лҶ’м•ҳмңјл©°, нҳ„мһҘм—җм„ң м§Ғм ‘ мёЎм •н•ң мҲҳкі мҷҖ мҳҒмғҒ 추м¶ң мҲҳкі мқҳ м°ЁмқҙлҠ” лҢҖмЎ°кө¬ 2.02 m, к°„лІҢ 20% мӢңн—ҳкө¬ 1.12 m, к°„лІҢ 40% 0.64 mмңјлЎң кі к°•лҸ„ мһ„분мқјмҲҳлЎқ мҲҳкі мҳӨм°ЁлҠ” лӮ®м•„м§ҖлҠ” кІғмңјлЎң ліҙмҳҖлӢӨ.
нқүкі м§ҒкІҪ-мҲҳкҙҖл©ҙм Ғ м¶”м •мӢқмқ„ мқҙмҡ©н•ҳм—¬ мӢӨм ң кҙҖмёЎлҗң мӮ°л¶Ҳ м—°лЈҢлҹүкіј л“ңлЎ мҳҒмғҒ кё°л°ҳ мӮ°л¶Ҳм—°лЈҢлҹүмқ„ 비көҗвӢ…분м„қн•ң кІ°кіј мөңмҶҢ 0.40 ton/ha - мөңлҢҖ 1.20 ton/haмқҳ м°ЁмқҙлҘј ліҙмҳҖлӢӨ. м „мІҙм Ғ мңјлЎң мӢӨм ң кҙҖмёЎк°’мқҖ м¶”м •м№ҳм—җ 비н•ҙ кіјмҶҢмёЎм •лҗҳлҠ” кІҪн–Ҙмқ„ ліҙмҳҖлӢӨ. мқҙлҹ¬н•ң мӣҗмқёмқҖ к°„лІҢк°•лҸ„лі„ мӢңн—ҳкө¬лҠ” к°Ғкё° лӢӨлҘё м§Җнҳ• кіј мһ„분조кұҙмқ„ к°Җм§Җкі мһҲмңјлӮҳ, DTM 추м¶ңмӢң кІ©мһҗнҒ¬кё°, 분м„қ к°ҒлҸ„, мқҙкІ©кұ°лҰ¬ л“ұмқ„ кі л Өн•ҳм§Җ м•Ҡкі лҸҷмқјн•ң мЎ°кұҙ н•ҳм—җ нӣ„мІҳлҰ¬ мһ‘м—…мқ„ мҲҳн–үн–Ҳкё° л•Ңл¬ёмңјлЎң ліҙмқёлӢӨ. 추нӣ„ м—¬лҹ¬ мЎ°кұҙлі„ DTM мғқм„ұ л°Ҹ н•„н„°л§Ғ 분м„қмқ„ мҲҳн–үн•ҳл©ҙ мҲҳкі м¶”м¶ңм—җ лҢҖн•ң м •нҷ•лҸ„лҘј лҶ’мқј мҲҳ мһҲмқ„ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
ліё м—°кө¬лҠ” мӢӨм ң мӮ°лҰјмЎ°мӮ¬к°Җ м•„лӢҢ л“ңлЎ мҳҒмғҒл§ҢмңјлЎң мӮ°лҰјм • ліҙлҘј мҲҳ집н•ҳм—¬ н•ҙлӢ№ мһ„분 лӮҙ мӮ°л¶Ҳм—°лЈҢлҹүмқ„ м¶”м •н• мҲҳ мһҲлҠ” л°©лІ•лЎ мқ„ м ңмӢңн•ң м—°кө¬мқҙлӢӨ. ліё м—°кө¬кІ°кіјм—җм„ң мӢӨм ң нҳ„мһҘмЎ°мӮ¬ кІ°кіјм№ҳмҷҖ мҳҒмғҒмқ„ мқҙмҡ©н•ң м¶”м •м№ҳк°Җ лҶ’мқҖ мғҒкҙҖм„ұмқ„ ліҙмһ„м—җ л”°лқј м •нҷ•лҸ„лҘј лҶ’мқј мҲҳ мһҲлҠ” 분м„қ кё°мҲ мқ„ 추к°Җ м Ғмҡ©н•ңлӢӨл©ҙ, мӢӨм ң мӮ°лҰјмЎ°мӮ¬ нҳ„мһҘм—җ лҸ„мһ…н• мҲҳ мһҲмқ„ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. лҳҗн•ң мқёкіөм§ҖлҠҘ кё°мҲ кіј лҚ”л¶Ҳм–ҙ кіөмӨ‘ LiDAR, м •л°Җмң„м„ұмҳҒмғҒ м •ліҙ мңөн•©мқ„ нҶөн•ҙ л”Ҙлҹ¬лӢқн•ҷмҠө л№…лҚ°мқҙн„°лҘј кө¬м¶•н•ңлӢӨл©ҙ, мӮ°лҰј мЎ°мӮ¬ л“ұм—җ мҶҢлӘЁлҗҳлҠ” мӢңк°„кіј 비мҡ©мқ„ нҡҚкё°м ҒмңјлЎң м Ҳм•Ҫн• мҲҳ мһҲлҠ” мІҙкі„к°Җ л§Ҳл Ёлҗ лҝҗл§Ң м•„лӢҲлқј мӮ°лҰј мқём ‘м§Җ мЈјліҖ м—°лЈҢкҙҖлҰ¬ м ңкұ°лӘ© м„ лі„, мӮ°лҰјкҙҖлҰ¬ мҡ°м„ мҲңмң„ лҢҖмғҒм§Җ м„ м • л“ұ мў…н•©м Ғмқё мӮ°л¶Ҳ м—°лЈҢкҙҖлҰ¬ мӢңмҠӨн…ң кө¬м¶•м—җ нҷңмҡ© к°ҖлҠҘн• кІғмңјлЎң кё°лҢҖлҗңлӢӨ.




