단일 시점 영상 분석 시스템을 통한 보강토 옹벽 모니터링 기법 연구
Monitoring Technique Using a Vision-based Single-Camera System for Reinforced Soil Retaining Wall
Article information
Abstract
보강토 옹벽은 국내외에서 널리 활용되고 있으며, 시공량이 많아짐에 따라 붕괴 사고 또한 빈번히 발생하고 있다. 안전성을 확보하기 위해 정기적으로 안전진단을 수행하고 있지만, 설계 및 시공 문제, 유지관리 문제, 집중강우와 같은 자연재해 등의 원인으로 예상치 못한 붕괴 사고가 발생하고 있다. 본 연구에서는 옹벽 구조물의 거동 형태를 바탕으로 단일 시점 영상을 분석하여 옹벽의 거동을 평가하는 기술을 개발하였다. 옹벽 구조물 내 목표영역을 설정하고 추적하기 위해 다양한 특징점 추출 및 매칭 기법을 비교하여 최적의 기법을 선정하였다. 보강토 옹벽 거동을 실시간으로 모니터링 하는 최적의 기법은 KAZE 기법이었으며, 상대오차는 0.03%에서 7.37%까지 분포하였다. 제안된 단일 시점 영상 분석 시스템은 높은 정확도를 기반으로 구조물의 안정성을 평가하는데 널리 활용될 것으로 판단된다.
Trans Abstract
Reinforced soil retaining walls are widely applied, and their frequency of collapse increases along with their use. Safety inspections are regularly conducted to ensure the structural safety of such walls. However, unexpected collapses occur for different reasons, such as design and construction problems, maintenance issues, and natural disasters including intensive rainfall. In this study, a single-camera system is proposed to evaluate the behavior of a retaining wall based on a single-perspective image. Various feature matching methods were compared to determine the optimal method for monitoring the retaining wall structure. The behaviors of the retaining wall structure were analyzed using the optimal method. The results indicate that the KAZE method provides the best results for monitoring the behaviors of a retaining wall, with errors ranging from 0.03% to 7.37%. The proposed single-camera system is widely used to evaluate the stability of a structure with high accuracy.
1. 서 론
보강토 옹벽은 1962년 Wide steel strip이 부착된 금속 전면부를 가진 옹벽의 형태로 제안된 이후, 현재는 다양한 전면부와 보강재들이 개발 및 적용되어 세계적으로 널리 활용되고 있다. 콘크리트 옹벽과 비교하여 블록과 보강재로 구성되는 각각의 집단이 서로 상호 보완하는 형태로 유연성이 강해 동적 하중에 대한 안정성이 크며, 공사 제한이 적어 시공성이 양호하기 때문에 국내에서도 다양한 현장에서 적용되고 있다. 보강토 옹벽 시장의 성장과 함께 관련 업체의 수가 급속히 증가하고 있으며, 이에 따라 업체간 수주 경쟁이 매우 치열한 실정이다(Kwon et al., 2007). 이러한 업체 경쟁은 가격 경쟁력 확보를 위해 검증되지 않은 보강토기법 적용과 저가의 보강재 사용 등에 따른 문제도 나타나고 있으며, 최근 정부 발주 공사에서도 보강토 옹벽의 피해사례가 지속적으로 발생하고 있다(Park and Lee, 2012). 이러한 문제를 해결하기 위해 2010년 국토해양부에서는 55개 현장에 대해 설계, 시공, 유지관리에 대한 단계별 감사를 실시하였고, 설계 미고려 사항 존재, 부적정 재료 및 검증 미흡 등 다양한 원인이 발견되었다. 다양한 문제가 발생하는 보강토 옹벽에 대해 붕괴를 예방하고 안정성을 확보하기 위해서 담당 기관에서는 유지관리 지침에 따라 보강토 옹벽을 관리하고 있다. 일반적으로 정기점검 및 정밀점검 등을 통해 특정 기간별 반복 검사를 실시하여 옹벽을 관리하고 있으나, 다양한 원인과 형태로 발생하는 옹벽 구조물의 붕괴 사고는 지속적으로 발생하고 있다. 특히 강우 시 집중호우로 인해 보강토 옹벽의 배수문제가 발생하여 자중 증가, 간극수압 증가, 전단강도 감소 등의 원인으로 붕괴로 이어지게 된다. 특히 지구온난화로 인해 집중호우는 잦아지고 있는 실정이며, 배수 문제 외에도 다양한 원인으로 인해 수시로 발생하는 거동 징후와 붕괴를 감지하기 위해서는 지속적이고 실시간으로 옹벽의 안정성을 평가하는 모니터링 기술이 필요하다. 경사계, 침하계, 토압계, 변위계 등의 다양한 계측기를 통해 옹벽 구조물의 거동 및 안정성을 평가하는 연구는 국내외에서 다양하게 수행되었다(Kim et al., 2006; Yang et al., 2009; Koo and Seong, 2012; Ahn and Cheng, 2014). 상기 기술된 계측기들은 계측기 주변의 국부적인 계측 결과만을 제공하기 때문에 구조물 전체 영역에 대한 안정성을 확보할 수 없으며, 전체 영역에 대한 계측 기록을 얻기 위해서는 많은 센서를 설치하고 관리해야 하기 때문에 많은 유지관리 비용이 발생한다는 단점이 있다. 이러한 문제점을 해결하기 위해 LiDAR, 레이저 스캐너와 같은 원격 탐사 장치를 활용하여 옹벽 구조물의 거동 및 안정성을 평가하기 위한 연구도 수행되었다(Oskouie et al., 2016; Aldosari et al., 2020). LiDAR와 레이저 스캐너와 같은 원격 탐사 장치는 3차원 좌표인 포인트 클라우드를 취득하여 유지관리를 수행할 수 있다는 장점이 있지만, 장비 및 소프트웨어의 가격으로 인해 경제성이 떨어진다는 단점이 있다.
본 연구에서는 실시간 옹벽의 안정성을 지속적으로 평가하기 위해 단일 시점에서 영상을 촬영하고, 영상분석을 통한 옹벽 구조물의 거동 및 안정성을 모니터링 하는 단일 시점 영상 분석 시스템을 제안하고자 한다. 단일 시점 영상 분석 시스템은 고정된 시점에서 촬영된 영상을 기반으로 옹벽 구조물 이미지 내 목표 영역의 거동을 추출 및 분석하기 위해 제안된 기술이며, 이를 검증하기 위해 실내 옹벽 구조물 거동 실험을 수행하였다.
2. 옹벽 구조물 붕괴 형태 검토
현장 및 실내실험을 통해 옹벽 구조물의 거동 및 붕괴 메커니즘을 규명하기 위해 수행된 연구들은 다음과 같다. Yang et al. (2009)은 전면판을 기준으로 0.5 m, 1 m 등 거리를 두어 변위 센서 및 수직방향 로드셀을 설치하여 전방변위와 가장 큰 전방변위가 발생하는 위치를 분석하였다. Leonards et al. (1994)은 118일간 특정 지점에서 전방 방향의 상대 변위를 계측하여 옹벽의 거동을 분석하였다. Koseki and Hayano (2000)는 벽체 하부에 집중되는 큰 상재하중으로 인해 전면부 배부름 즉 변위가 발생하게 되고, 배부름 이후 보강재 탈락 및 인발이 발생하여 국부적 불안정으로 인해 붕괴로 이어진다고 분석하였다. Shinde and Mandal (2007)은 실내실험 및 수치해석을 통해 전면부 변위를 분석하였고, Bathurst and Benjamin (1990)은 지오그리드 보강토 옹벽의 붕괴를 규명하기 위해 대형 실험을 통해 층별 전방변위를 분석하였다. Benjamim et al. (2007)은 대형 실험을 통해 지오텍스타일 옹벽 구조물의 거동을 분석하기 위해 수평 변위, 침하 계측을 수행하였다. Panah et al. (2015)은 5가지 보강형태에 대해 진동대실험을 수행하여 구조물의 동적 안정성을 분석하고자 전방변위를 계측하였다.
다양한 문헌들에 나타낸 것처럼 옹벽의 안전성을 평가하고 예측하기 위한 주요 변위요소는 전방변위 및 침하이며, 이 요소들은 옹벽 구조물의 안정성을 저해할 수 있는 중요한 요소임을 의미한다. 실제로 Berg et al. (2009)의 MSE 옹벽의 LRFD 기초 설계 단계에 따르면 외적 안정성과 내적안정성을 평가하고 침하와 전방변위를 평가하여 시공하도록 설계ㆍ시공 단계를 제시하고 있다. 또한, Koerner and Koerner (2018)는 전세계 옹벽 붕괴사고 317개를 분석하여 붕괴 메커니즘을 네 가지로 분류하였으며, 각각의 메커니즘은 적재하중, 수압 및 토압에 의해 전방변위 및 침하가 발생하여 붕괴로 이어진다고 분석하였다.
특히 옹벽의 재하 및 비배수 등의 외적 요소는 옹벽의 연속적인 구조적 형태로 인해 측면 방향이 아닌 전방 방향으로 변위를 주로 유발하게 된다. 따라서 본 연구에서는 옹벽 구조물의 안정성을 저하시키고, 붕괴로 이어지는 거동 형태인 전방변위와 침하를 옹벽 구조물 주요 거동 형태로 분류하였다. 단일 시점에서 촬영된 이미지를 통해 구조물을 지속적으로 모니터링하여 거동과 안정성을 분석하는 기법을 제안하였다. 실험적으로 검증하기 위한 구조물 거동의 충분조건으로서 전방변위, 침하, 복합변위와 같이 세 가지 변위 형태를 제시하였으며, 변위 형태에 따른 모니터링 기법을 검증하기 위해 각각 실내 모형실험을 수행하였다. 실내 모형실험에서는 구조물에 대해 전방변위, 침하, 복합변위 형태의 거동을 모사하였고, 각각의 변위 형태에서의 영상 분석 값과 실제 변위 발생 값을 비교하여 제안된 기법을 평가하였다.
3. 단일 시점 영상 분석 시스템
Fig. 1은 구조물의 3차원 거동을 영상을 통해 분석하기 위해 사용되는 스테레오 카메라 시스템(Stereo camera system)과 단일 시점 영상 분석 시스템(Single camera system)을 나타낸다. Fig. 1(a)는 스테레오 카메라 시스템에 대한 설명으로 3차원 공간 내 P1, P2, P3, P4가 있을 때, 왼쪽 시점에서는 P1, P2, P3에 대해, 오른쪽 시점에서는 P3, P4에 대해 공간 불분명 영역(Gray zone)이 발생하게 된다. 따라서 하나의 시점에서 발생하는 이러한 문제를 해결하기 위해 2개 이상의 시점에서 촬영된 이미지를 분석하여 3차원 거동을 분석하는 기법을 스테레오 카메라 시스템이라고 한다. 스테레오 카메라 시스템을 통해 다양한 옹벽의 변위를 계측하며, 이 결과값을 토탈스테이션 값과 비교하여 검증하는 연구가 다양하게 수행되었다(Han et al., 2006; Jiang and Jauregui, 2010; Esmaeili et al., 2013; Lee et al., 2016; Oats et al., 2017; Zhao et al., 2018). 또한, 드론 영상을 통해 다양한 시점의 이미지를 기반으로 변위를 계측하는 연구도 진행되었다(Esmaeili et al., 2019). 하지만 스테레오 카메라 시스템은 최소 2개 이상의 다양한 시점의 이미지를 기반으로 하기 때문에 다수의 카메라를 설치해야 한다는 단점이 있다. 또한, 하나의 카메라를 활용하는 경우 다양한 시점에서 영상을 촬영한 후에 분석을 수행할 수 있기 때문에 지속적인 변위를 계측하기에는 어려움이 있다.
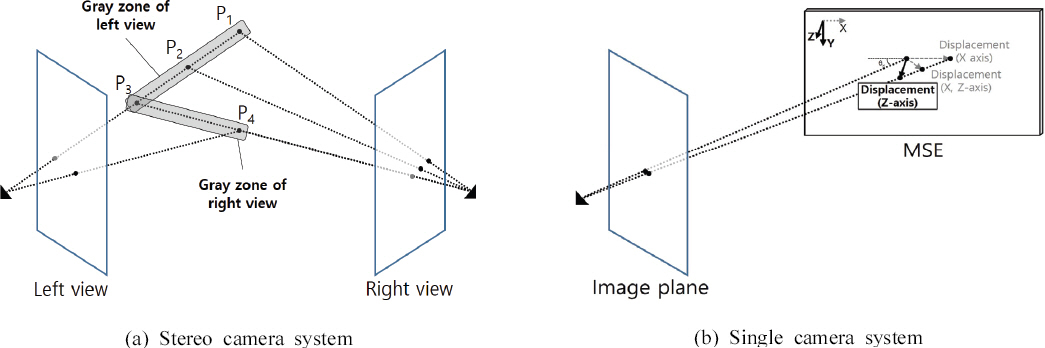
Comparison of Stereo Camera System and Single Camera System
이러한 단점을 해결하기 위해서 단일 시점 카메라 시스템을 활용하여 구조물의 변위를 계측하는 연구가 다양한 연구자에 의해 수행되었다(Lee and Shinozuka, 2006; Choi et al., 2011; Fukuda et al., 2013; Feng et al., 2015). 하지만 기존 연구들은 모두 일축 방향의 변위를 계측하였기 때문에 구조물에서 발생할 수 있는 전체 거동을 분석할 수 없다는 한계점이 있다.
본 연구에서는 일반적인 옹벽 구조물의 변위 형태인 전방변위와 침하만을 고려하였다. 이를 통해 Fig. 1(b)와 같이 하나의 시점에서도 공간 불분명 영역이 존재하지 않아 단일 시점의 이미지를 기반으로 옹벽 구조물의 거동을 분석할 수 있다. Fig. 2는 본 연구에서 제안된 단일 시점 영상 분석 시스템을 나타낸다. 카메라와 구조물과의 거리, 입사각, 카메라 파라미터 정보의 기하학적 관계를 통해 구조물의 거동을 분석할 수 있으며, Fig. 2의 이미지 평면 내의 x-y 변화량(△dxi, △dyi)을 실제 구조물의 Y-Z 거동(Before to after)으로 산출하게 된다. 하지만 카메라와 구조물이 정면 방향으로 직교하는 경우에는 전방변위 검출 시 공간 불분명 영역이 발생하기 때문에 θx는 90˚를 포함하지 않는다.
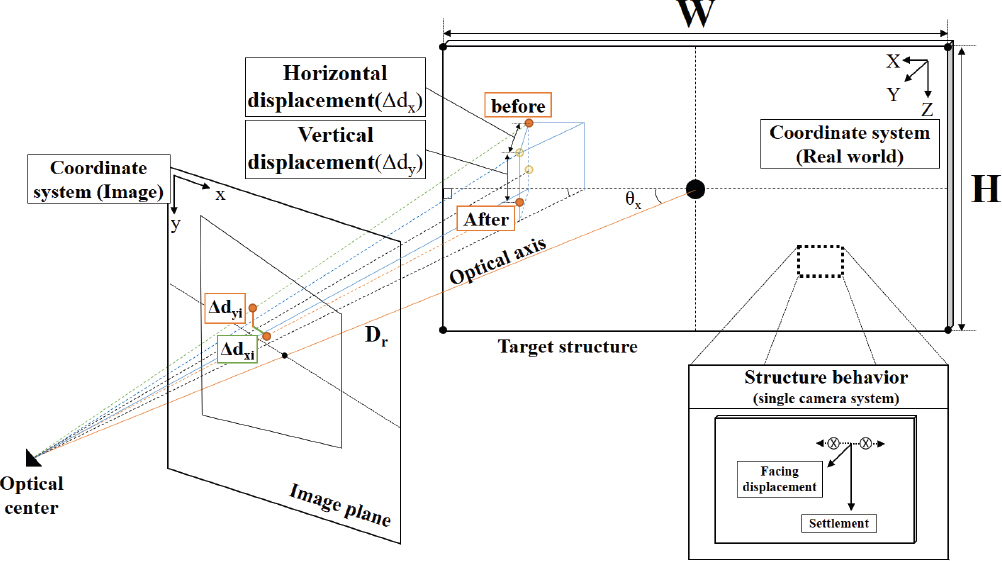
Single Camera System
4. 특징점 추출 및 매칭 기법
특징점 추출 및 매칭 기법은 이미지 대상 영역의 특징점을 추출하고, 두 개의 이미지 상에서 추출된 특징점들 중 같은 특징점이라 추정되는 곳들을 매칭하는 기술을 말한다. 특히 물체 감지, 물체 추적, 증강현실 등의 다양한 컴퓨터 머신 비전 분야에서 널리 활용되고 있다(Tareen and Saleem, 2018). 사용성이 확대됨에 따라 다양한 조건에 대해 더 정확하고 빠른 특징점을 추출하고 매칭하기 위한 방법들이 지속적으로 개발되고 있으며, 본 연구에서 활용된 5가지 특징점 추출 및 매칭 기법은 다음과 같다 : MinEigen (Shi and Tomasi, 1994), SURF (Bay et al., 2008), BRISK (Leutenegger et al., 2011), ORB (Rublee et al., 2011), KAZE (Alcantarilla et al., 2012). 다양한 특징점 추출 및 매칭 기법이 개발됨에 따라 각각의 특징점 추출 및 매칭 기법의 성능을 평가하는 다양한 연구가 수행되었다. Tareen and Saleem (2018)은 중첩되는 부분이 있는 두 개의 건물 및 배경 이미지를 활용하여 크기, 회전, 시점 등의 변화에 따른 이미지 매칭 결과를 분석하였고, 최종적으로 SIFT 기법이 가장 정확한 알고리즘이라고 판단하였다. Pieropan et al. (2016)은 영상 내 움직이는 요소를 추적하기 위해 각각의 기법을 적용하였다. 각각의 기법에 대해 특수성, 추적 정확도, 추적 성능을 기준으로 분석하였고, 작은 물체의 변형 검출 시 AKAZE와 SIFT가 높은 성능을 나타냈으며, 큰 움직임을 검출할 때에는 ORB, BRISK가 높은 성능을 나타내었다. Cowan et al. (2016)은 각각의 기법에 대해 속도, 반복성, 정밀도, 재현성을 기준으로 평가하여 BRISK가 가장 높은 성능을 나타내는 것을 확인하였다. Srividhya and Prakash (2017)는 각각의 기법에 대해 주어진 이미지에 회전, 크기, 다양한 노이즈에 대한 특징점 개수와 속도를 평가하여 MinEigen이 가장 높은 성능을 나타내는 것을 확인하였다. Chien et al. (2016)은 복잡한 거리의 다양한 움직이는 대상에 대해 각각의 기법을 적용하였고, SURF가 우수한 정확성을 나타나는 것을 확인하였다. 이처럼 최적의 성능을 나타내는 기법은 이미지의 고유 특성과 이미지가 변화되는 조건에 따라 달라지기 때문에, 옹벽 구조물을 모사한 실내 구조물 이미지에 대한 최적의 특징점 추출 및 매칭 기법을 우선적으로 평가해야 한다. 최적의 특징점 추출 및 매칭 기법의 성능을 평가하기 위해 주로 활용되는 반복성을 평가하였다. 이미지 내 관심영역과 매칭된 특징점 개수, 무변위 상태 구조물 이미지에 대해 추정된 크기 및 회전값을 실제 값과 비교하여 다양한 방법으로 최적의 기법을 평가하였다.
5. 실내 옹벽 구조물 거동 분석
5.1 실내 옹벽 구조물 거동 실험
Fig. 3은 실내 옹벽 구조물 거동 실험의 형태를 나타내며, Fig. 4는 토탈스테이션 시트 타겟이 부착된 12개의 영역과 시트 타겟이 부착되지 않은 4개의 영역을 나타낸다. Fig. 4에 나타난 무변위 상태를 기준으로 구조물을 전방으로 이동시켜 전방 변위를 모사하였으며, 구조물 하부에 위치한 Steel plate를 제거하여 침하를 모사하였다. 복합변위는 전방변위와 침하를 함께 발생시킨 경우이다. 각각의 변위 형태에 대한 정확한 변위의 기준값을 정의하기 위해 토탈스테이션 을 활용하여 목표 영역들의 변위를 검출하였다.
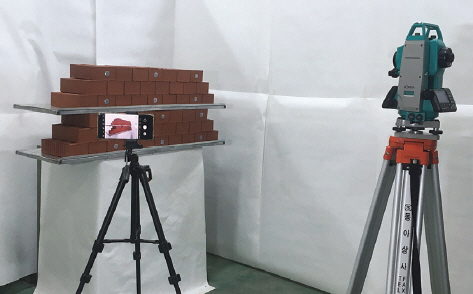
Experiment of MSE Wall Displacement
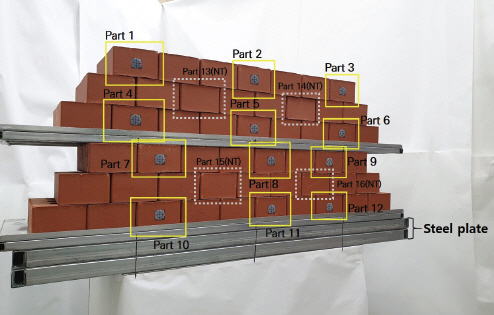
Target Parts of Retaining Wall Structure (NT: No sheet target)
실내 옹벽 구조물 거동 분석은 크게 두 부분으로 구분할 수 있다. 첫째, 시트 타겟이 부착된 12개의 영역에 대해 5가지의 특징점 추출 및 매칭 기법을 적용하여 최적의 특징점 추출 및 매칭 기법을 검출한다. 둘째, 검출된 최적의 특징점 추출 및 매칭 기법을 통해 산출된 이미지 내 변화량을 기반으로 옹벽 구조물의 거동을 산출하여 토탈스테이션 계측값을 통해 검증한다. 최적의 특징점 추출 및 매칭 기법을 검출하기 위해 12개의 시트 타겟이 부착된 영역에 대해 5가지 기법을 적용하였다. 각각 무변위, 전방변위, 침하, 복합변위 상태에 대한 반복성, 매칭점 개수를 평가하였다. 또한, 변화가 발생하지 않은 무변위 형태에 대해 매칭 결과값인 크기 및 회전 추정값을 산출하여 기존 값(크기 변화 : 0, 회전 변화 : 0)을 비교하여 기법의 성능을 평가하였다. 이를 통해 선정된 최적의 특징점 추출 및 매칭 기법을 옹벽 구조물의 거동 형태별로 추출된 이미지에 적용하여 x-y 변화량(△dxi, △dyi)을 추출하였으며, 이를 단일 시점 영상 분석 시스템에 적용하여 구조물의 전방변위와 침하를 검출하였다. 옹벽 구조물 거동 분석값을 검증하기 위해 시트 타겟이 부착된 12개의 영역의 계측값을 활용하였으며, 시트 타겟이 부착되지 않은 4개의 영역에 대해서는 계측값들의 사잇값을 활용하였다.
Table 1은 실험에 사용된 블록, 카메라 및 토탈스테이션의 기본 정보를 나타낸다. 옹벽 구조물의 블록은 널리 활용되고 있는 적벽돌을 활용하였으며, 카메라는 SM-G977N 핸드폰 기종에 부착된 후면부 카메라를 활용하였다. 토탈스테이션은 Sokkia사의 SET510K 모델이 활용되었으며, 정확도는 1-3 mm 값을 가진다.

Detail of Experimental Equipments
5.2 최적 특징점 추출 및 매칭 기법 평가
Fig. 5는 무변위, 전방변위, 침하, 복합변위 상태에서 각각의 영역(Part)에 대해 특징점 추출 개수와 매칭 개수의 비인 반복성을 나타낸다. 반복성은 100%에 가까울수록 특징점 매칭 개수와 특징점 개수가 일치하여 매칭 성능이 좋다는 것을 의미한다. 무변위 상태에서는 영역이 추출된 기준이 되는 점이기에 100%에 가까운 결과를 추출되어야하지만 다양한 형태의 물체가 나열된 것이 아닌 같은 블록들이 나열되고 쌓여있는 옹벽 구조물 형태의 이미지이기 때문에 특징점의 강도가 낮아 100%의 값을 나타내진 못했다. 또한, Figs. 5(b), (c), (d)에서는 각각 전방변위, 침하, 복합변위가 발생함에 따라 이미지 내 각각의 영역들의 형태가 변하여 크기, 회전, 투영 형태의 변화가 발생하였기 때문에 점점 더 낮은 반복성을 나타낸다. 반복성 결과에서 목표 영역(Part 1~12)에 따라 더 높은 반복성을 가지는 특징점 추출 및 매칭 기법은 달라지지만, 모든 변위 형태에서 SURF, KAZE가 다른 기법과 비교하여 더 높은 성능을 나타내는 것을 알 수 있다. Fig. 6은 무변위, 전방변위, 침하, 복합변위 상태에서 각각의 영역에서의 특징점 매칭 개수를 나타낸다. 매칭점 개수가 많다는 것은 특징점이 일치하는 구간이 많다는 것을 의미하기 때문에 더 좋은 성능을 판별할 수 있는 근거가 된다. 무변위 상태에서는 KAZE, ORB, MinEigen 기법이 상대적으로 많은 매칭점 개수를 나타내고 있지만, 전방변위, 침하, 복합변위 상태에서는 KAZE 기법이 다른 기법에 비해 1.12배에서 74.66배 더 많은 매칭점이 검출된 것을 알 수 있다. 매칭점의 결과를 통해 KAZE 기법의 특징점 매칭 성능이 다른 기법들에 비해 우수하다는 것을 알 수 있다. 반복성과 매칭점 개수의 결과를 정리하면, KAZE 기법이 옹벽구조물을 평가하는 최적의 특징점 추출 및 매칭 기법으로 평가되었다. KAZE 기법이 최적의 기법인지 검증하기 위해 크기 및 회전의 변화가 없는 무변위 상태에서 특징점 매칭 이후 이미지의 크기 및 회전 변화량을 산출하여 기준값과 비교하여 성능을 평가하였다.
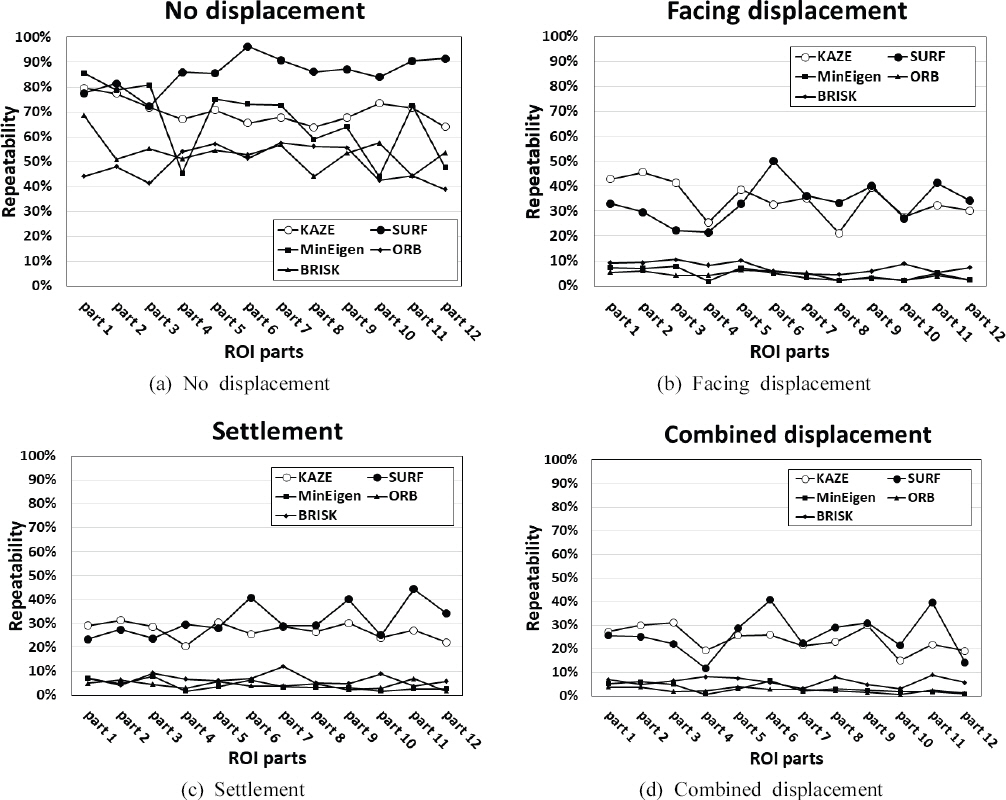
Repeatability with Different Types of Feature Matching Method

The Number of Matching Points with Different Types of Feature Matching Method
Table 2는 무변위 상태에서의 각 영역의 크기 및 회전 변화량을 나타낸다. 무변위 상태의 영역들을 무변위 상태의 구조물과 비교하는 것이기 때문에 크기 추정값은 1에 가까울수록, 회전 추정값은 0에 가까울수록 더 정확한 매칭이 수행된 것이다. 크기 및 회전 추정 값이 이상적인 값에 가장 가까운 기법은 KAZE이며, 표준편차 또한 가장 작게 나타났다. 따라서 상기 기술된 매칭점 성능 비교 연구들에 따르면 반복성이 높을수록 좋은 성능을 나타낸다고 설명하고 있지만, 반복성이 절대적인 기준이 될 수 없다는 것을 알 수 있다. 반복성, 매칭점 개수, 무변위 상태 검증을 통해 종합적으로 판단하였을 때, KAZE 기법이 옹벽 구조물 거동 분석을 위한 최적의 특징점 추출 및 매칭 기법으로 평가되어 단일 시점 옹벽 구조물 거동 분석에 활용되었다.
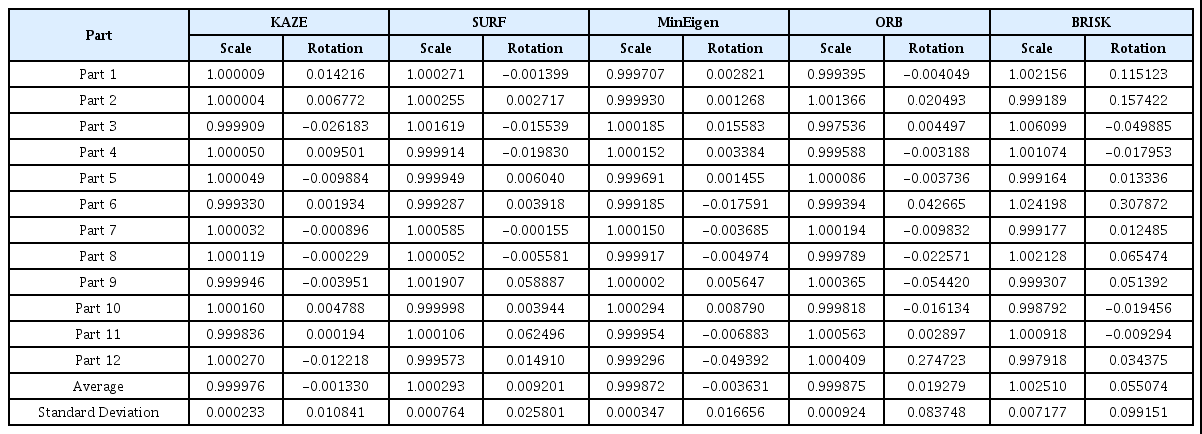
Calculated Scale and Rotation from Each Feature Matching Methods
5.3 단일 시점 옹벽구조물 거동 평가
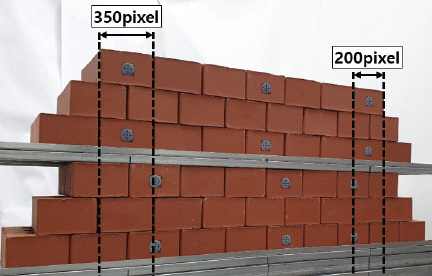
Fig. 4에 나타낸 16개 영역(with Target Sheet: 12, without Target Sheet: 4)에 대해 옹벽 구조물 거동을 분석하였다. Table 3은 임의로 발생시킨 3가지 변위 형태에 따른 단일 시점 영상 분석 시스템 분석 결과와 토탈스테이션 계측 결과를 비교하여 나타내었다. 각각의 변위 형태에 대해 최대 변위 오차는 수평방향의 변위에서 발생하였으며, 그 값은 각각 3.87 mm (4번 영역), 6.64 mm (10번 영역), 4.99 mm (10번 영역)이다. Fig. 7은 이미지 내 옹벽 구조물의 좌측과 우측 블록이 표시되는 픽셀의 개수를 나타내었다. 같은 크기의 블록이더라도 원근법으로 인해 이미지 좌측에 위치한 블록은 350 픽셀, 우측에 위치한 블록은 200 픽셀에 걸쳐 분포하고 있다. 따라서 하나의 픽셀 당 실제 mm 값도 좌측이 더 크기 때문에 같은 픽셀의 오차가 발생하더라도 구조물 거동에서는 좌측에서 더 큰 오차로 산출되게 된다.

Comparison of Calculated Displacements and Reference Values (NT: No sheet target)
Difference of Pixels at Left and Right Side
Fig. 8은 수평 변위와 수직 방향의 변위 계측 값과 토탈스테이션 값을 기반으로 최종 변위를 산정하여 산출한 상대 오차를 나타내었으며, 스테레오 카메라 시스템을 활용한 구조물 거동 분석 연구 결과들과 비교하였다. 우선 본 연구에서 계측된 오차는 각각의 변위 형태에서 최대 오차값은 각각 6.29%, 7.37%, 3.92%이었으며, 최소 오차값은 각각 0.31%, 0.09%, 0.03%로 나타났다. 본 결과는 함께 비교된 논문들의 최대 오차(54.95%, 16.70%)와 비교하여 우수한 결과를 나타내며, 인용된 문헌들의 촬영거리 및 대상 구조물 규격을 고려하더라도 충분한 성능을 나타낸다고 판단된다.
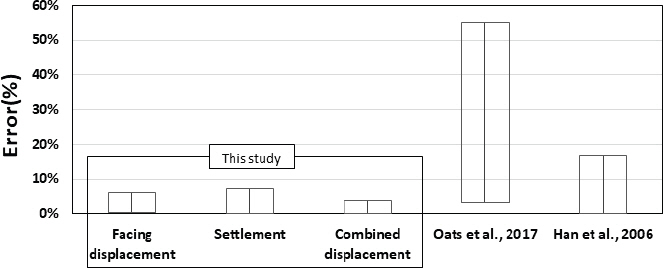
Errors at Each Types of Displacement Comparing with Other Studies
6. 결 론
본 연구에서는 옹벽 구조물의 거동 형태를 바탕으로 지속적인 모니터링을 실시할 수 있는 단일 시점 영상 분석 시스템을 제안하였다. 동일한 벽돌이 배열되고 층으로 쌓여 동일한 특징이 반복되는 형태에서의 최적의 특징점 추출 및 매칭 기법을 검출하기 위해 반복성, 매칭점 개수, 무변위 상태의 크기 및 회전 추정값을 기준값과 비교하여 성능을 평가하였다. KAZE 기법은 모든 기준에서 높은 성능을 보였으며, 단일 시점 영상 분석 시스템에 KAZE 기법을 적용하여 구조물의 전방변위, 침하, 복합변위를 계측하였다. 계측한 결과는 토탈스테이션 계측 값과 비교되었으며, 모든 변위형태의 최대오차는 좌측에 존재하는 영역에서 검출되었다. 이는 원근법으로 인해 같은 크기의 블록이더라도 더 많은 픽셀에 분포하여 하나의 픽셀이 더 많은 mm 값을 포함하기 때문에, 특징점 매칭 시 발생할 수 있는 같은 크기의 오차라도 좌측에 존재할 때 더 큰 오차로 산출되게 되기 때문이다. 구조물 거동을 분석한 논문들과 비교하기 위해 각각의 축방향 변위가 아닌 최종 발생 변위에 대한 오차를 산출하였고, 최대 오차는 각각 6.29%, 7.37%, 3.92%이었으며, 최소 오차는 각각 0.31%, 0.09%, 0.03%로 나타났다. 기타 논문들의 오차 범위와 비교하여 우수한 결과를 나타내었고, 옹벽 구조물의 거동을 분석하는데 활용될 수 있다고 판단된다.
감사의 글
본 연구는 국토교통부/국토교통과학기술진흥원의 지원으로 수행되었음(과제번호 20TSRD-B151228-02).