

1. м„ң лЎ
нҳ„лҢҖ лҸ„мӢңм—җм„ңлҠ” кёүмҶҚн•ң лҸ„мӢңнҷ”, мқёкө¬ кіјл°Җнҷ” л“ұмңјлЎң мқён•ҙ мҙҲкі мёө кұҙ축물 л°Ҹ м§Җн•ҳкіөк°„ к°ңл°ңмқҙ мҰқк°Җн•ҳкі мһҲлӢӨ(Lee and An, 2001). н•ңнҺё мөңк·ј м„ёкі„м ҒмңјлЎң м§Җ진мқҙ л№ҲлІҲнһҲ л°ңмғқн•ҳкі мһҲмңјл©°, м§Җ진 мһ¬лӮңм—җ лҢҖн•ң мӢңлӮҳлҰ¬мҳӨ кІҖнҶ л°Ҹ лҢҖ비, кҙҖлҰ¬м—җ лҢҖн•ң лӢӨм–‘н•ң м—°кө¬к°Җ 진н–ү мӨ‘мқҙлӢӨ(Koo et al., 2017; Kim et al., 2018). мҙҲкі мёө кұҙ축물мқҳ кІҪмҡ°м—җлҠ” мқёкө¬к°Җ л°Җ집лҗҳм–ҙ мһҲкё° л•Ңл¬ём—җ м§Җ진 л°ңмғқ мӢң л§үлҢҖн•ң н”јн•ҙлҘј мһ…мқ„ мҲҳ мһҲлӢӨ(Ahn et al., 2017). лҢҖк·ңлӘЁ м§Җ진мқҙ л°ңмғқн• кІҪмҡ° мқјл°ҳм ҒмңјлЎң м§Җн•ҳкө¬мЎ°л¬јмқҖ м§ҖмғҒкө¬мЎ°л¬јліҙлӢӨ мҳҒн–Ҙмқ„ м ҒкІҢ л°ӣм§Җл§Ң, кө¬мЎ° нҳ•мғҒкіј к·ңлӘЁм—җ л”°лқј м§Җн•ҳкө¬мЎ°л¬јм—җлҸ„ лӢӨм–‘н•ң мң нҳ•мқҳ мҶҗмғҒмқҙ л°ңмғқн• мҲҳ мһҲлӢӨ. л”°лқјм„ң м§Җ진 л°ңмғқ нӣ„ мҰүк°Ғм Ғ лҢҖмқ‘мқ„ мң„н•ҙ кө¬мЎ°л¬ј мҶҗмғҒмң„м№ҳлҘј нҢҢм•…н•ҳлҠ” кІғмқҖ л§Өмҡ° мӨ‘мҡ”н•ҳлӢӨ.
нҳ„мһ¬ кө¬мЎ°л¬ј кұҙм „лҸ„ нҸүк°ҖлҘј мң„н•ҙ м „л¬ёк°Җмқҳ 진лӢЁкІҖмӮ¬к°Җ мҲҳн–үлҗҳкі мһҲм§Җл§Ң л§ҺмқҖ мӢңк°„кіј мқёл Ҙмқҙ мҡ”кө¬лҗҳл©°, к°қкҙҖм„ұ л“ұмқҳ л¬ём ңлЎң мқён•ҳм—¬ лҢҖнҳ• кө¬мЎ°л¬јм—җм„ңлҠ” мЈјлЎң 비нҢҢкҙҙ нҸүк°Җл°©лІ•мқҙ мӮ¬мҡ©лҗҳкі мһҲлӢӨ(Shin and Jo, 2009; Hong, 2012; Na, 2015). 비нҢҢкҙҙ л°©лІ• мӨ‘м—җм„ң мқҢн–Ҙл°©м¶ң(acoustic emission)кіј к°ҷмқҖ нғ„м„ұнҢҢлҘј мқҙмҡ©н•ҳлҠ” л°©лІ•мқҖ мӢ нҳёмқҳ лҸ„лӢ¬мӢңм°Ё 분м„қмқ„ нҶөн•ҙ мҶҗмғҒ мң„м№ҳм¶”м •мқҙ к°ҖлҠҘн•ҳлӢӨ(Ohtsu, 1995). мқҙлҹ¬н•ң мҶҗмғҒмң„м№ҳ м¶”м • мӢң нҢҗнҳ• кө¬мЎ°л¬ј(plate-like structure)мқҖ н‘ңл©ҙнҢҢ(surface wave)лҘј мӮ¬мҡ©н•ҳл©°(Kee, 2015), л‘җк»ҳк°Җ 충분н•ң нҳ•мғҒмқҳ кө¬мЎ°л¬јм—җм„ңлҠ” PнҢҢк°Җ мӮ¬мҡ©лҗңлӢӨ(Lee et al., 2013).
мӢ лў°лҸ„ лҶ’мқҖ мҶҗмғҒмң„м№ҳ м¶”м •мқ„ мң„н•ҙм„ңлҠ” мһ…л Ҙк°’мңјлЎң мӮ¬мҡ©лҗҳлҠ” нғ„м„ұнҢҢ мҶҚлҸ„ кІ°м •мқҙ л§Өмҡ° мӨ‘мҡ”н•ҳлӢӨ. кө¬мЎ°л¬ј мҶҗмғҒм—җ мқҳн•ҙ л°©м¶ңлҗң мӢ нҳёк°Җ мӢӨм ңлЎң лӢӨм–‘н•ң м „нҢҢнҠ№м„ұмқ„ к°Җм§Җкё° л•Ңл¬ём—җ, лӢЁмқј нғ„м„ұнҢҢ мҶҚлҸ„ мһ…л Ҙк°’мқ„ мқјкҙ„м ҒмңјлЎң м Ғмҡ©н•ңлӢӨл©ҙ м •нҷ•н•ң мҶҗмғҒмң„м№ҳ м¶”м •мқҙ м–ҙл өлӢӨ(Kim et al., 1994; Kim et al., 2008; Zhou et al., 2017). мқјл°ҳм ҒмңјлЎң мҲҳм№ҳн•ҙм„қ н”„лЎңк·ёлһЁмқҙлӮҳ мҶҗмғҒмң„м№ҳм¶”м • н”„лЎңк·ёлһЁмқҳ кІҪмҡ° мқјм •н•ң нғ„м„ұнҢҢ мҶҚлҸ„лҘј мһ…л Ҙк°’мңјлЎң мӮ¬мҡ©н•ҳкё° л•Ңл¬ём—җ м •нҷ•н•ң мң„м№ҳм¶”м •м—җ мһҲм–ҙ н•ңкі„к°Җ мһҲлӢӨ(Han et al., 2015). л”°лқјм„ң кө¬мЎ°л¬јм—җм„ң л°ңмғқн•ҳлҠ” к· м—ҙмқҳ мң„м№ҳлҘј м •нҷ•нһҲ м°ҫкё° мң„н•ҙм„ңлҠ” нғ„м„ұнҢҢмқҳ нҠ№м„ұ(м „нҢҢлӘЁл“ң, м „нҢҢмҶҚлҸ„)мқ„ нҢҢм•…н•ҳлҠ” кІғмқҙ мӨ‘мҡ”н•ҳлӢӨ.
ліё м—°кө¬м—җм„ңлҠ” нҢҗнҳ• нҷ”к°•м•” мӢңнҺёмқ„ мқҙмҡ©н•ҳм—¬ м„јм„ң л°°м—ҙ(к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬)м—җ л”°лҘё мҶҗмғҒмң„м№ҳ м¶”м •мӢӨн—ҳмқ„ мӢӨмӢңн•ҳмҳҖлӢӨ. мҶҗмғҒмң„м№ҳ м •нҷ•лҸ„лҘј 분м„қн•ҳкё° мң„н•ҙм„ң мқјл°ҳм ҒмңјлЎң мҶҗмғҒ мң„м№ҳм¶”м •м—җ нҷңмҡ©лҗҳлҠ” PнҢҢ мҶҚлҸ„, н‘ңл©ҙнҢҢ мҶҚлҸ„, м„јм„ңм„Өм№ҳ кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„лҘј мёЎм •н•ҳм—¬ 비көҗ분м„қн•ҳмҳҖлӢӨ. ліё м—°кө¬мқҳ мӢӨн—ҳкІ°кіјлҠ” н–Ҙнӣ„ м§Җ진м—җ мқҳн•ң нҢҗнҳ• кө¬мЎ°л¬ј(лІҪ кө¬мЎ°л¬ј лҳҗлҠ” л§ӨнҠёкё°мҙҲ кө¬мЎ°л¬ј)мқҳ мҶҗмғҒ мӢң, кұҙм „лҸ„ нҸүк°Җм—җ мһҲм–ҙ мң мҡ©н•ҳкІҢ нҷңмҡ©лҗ мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖн•ңлӢӨ.
2. мӢӨн—ҳл°©лІ•
2.1 мӢңнҺёмқҳ мӨҖ비
ліё мӢӨн—ҳм—җм„ңлҠ” мһ¬лЈҢмқҳ к· м§Ҳм„ұмқ„ нҷ•ліҙн•ҳкё° мң„н•ҙм„ң мӢ м„ н•ң нҷ”к°•м•” мӢңнҺёмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ. мӢңнҺёмқҳ нҳ•мғҒмқҖ нҢҗнҳ•мғҒмңјлЎң 30 cm Г— 70 cm Г— 3 cm нҒ¬кё°м—җ н•ҙлӢ№н•ңлӢӨ(Fig. 1). мӢңнҺёмқҳ м–‘мӘҪ л©ҙм—җ X축 л°©н–ҘмңјлЎң 10 cm, Y축 л°©н–ҘмңјлЎң 6 cm к°„кІ©мңјлЎң кІ©мһҗлҘј нҳ•м„ұн•ҳмҳҖлӢӨ. мҙқ 24к°ң кІ©мһҗлҘј кө¬м„ұн•ҳм—¬ к°Җ진мң„м№ҳмҷҖ м„јм„ң м„Өм№ҳлҘј мң„н•ң мўҢн‘ңлЎң мқҙмҡ©н•ҳмҳҖлӢӨ.
2.2 мӢңнҺёмқҳ нғ„м„ұнҢҢ мҶҚлҸ„мёЎм •
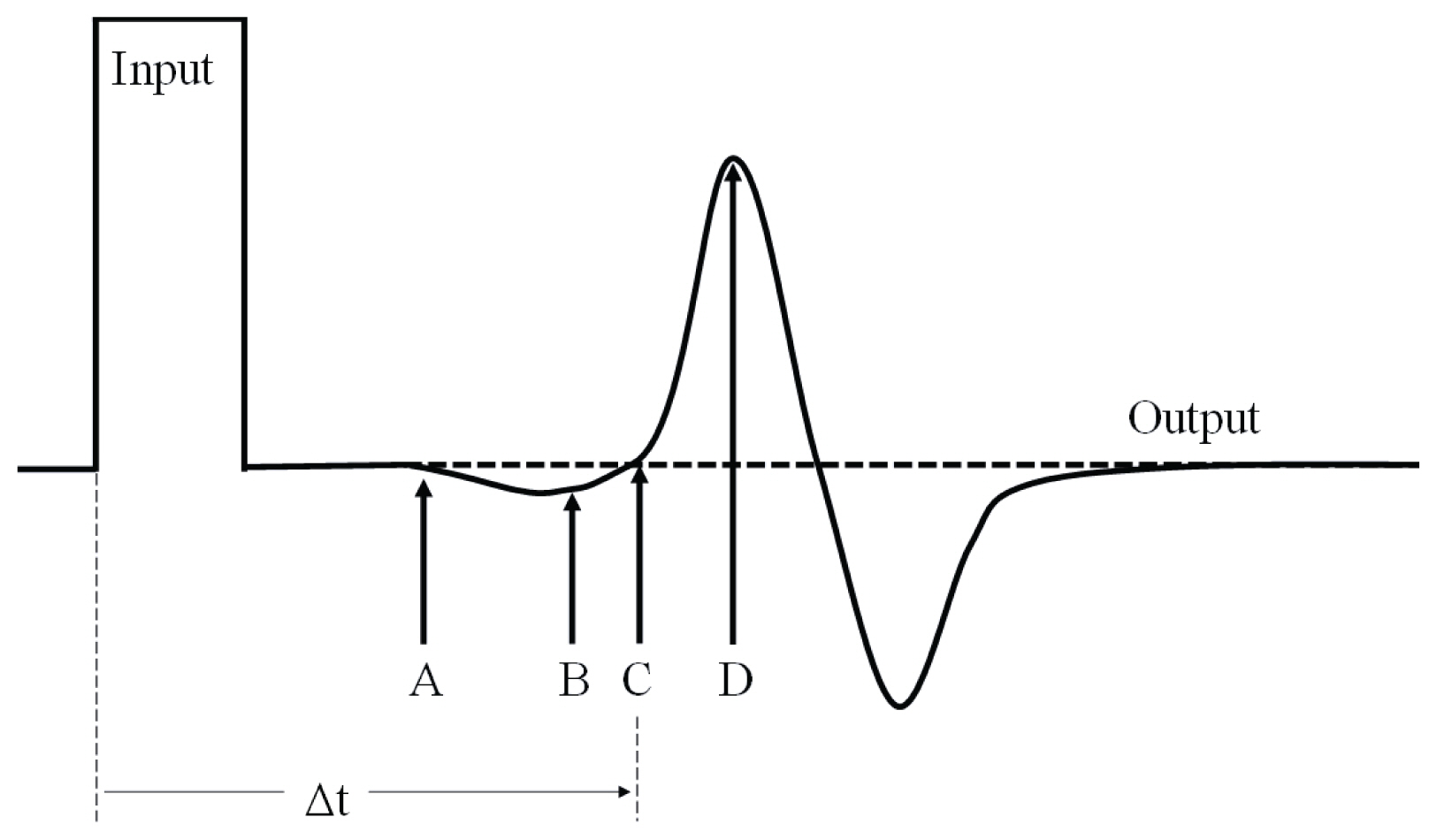
мң„м№ҳм¶”м •мқ„ мң„н•ң нғ„м„ұнҢҢ мҶҚлҸ„ мһ…л Ҙк°’мқ„ кө¬н•ҳкё° мң„н•ҳм—¬ мӮ¬мҡ©лҗң мӢңнҺёмқҳ кё°ліём Ғмқё PнҢҢ мҶҚлҸ„мҷҖ н‘ңл©ҙнҢҢ мҶҚлҸ„лҘј мёЎм •н•ҳмҳҖлӢӨ. PнҢҢмҷҖ н‘ңл©ҙнҢҢ мҶҚлҸ„мӮ°м •мқ„ мң„н•ҙ мӢ нҳёк°Җ진л§қм№ҳ(PCB 086C01)лҘј мқҙмҡ©н•ҙ мқјм •н•ң кұ°лҰ¬м—җм„ң 충격мқ„ л°ңмғқмӢңнӮӨкі к°Ғк°Ғмқҳ м„јм„ң(к°ҖмҶҚлҸ„кі„, PCB: 352C22)лЎң мӢ нҳёлҘј мҲҳ집н•ҳмҳҖлӢӨ. нғ„м„ұнҢҢ мҶҚлҸ„лҠ” к°Җ진мӣҗкіј м„јм„ң мӮ¬мқҙмқҳ мӢңк°„ м°ЁмқҙмҷҖ кұ°лҰ¬лҘј мқҙмҡ©н•ҳм—¬ мӮ°м •н•ҳмҳҖлӢӨ. нғ„м„ұнҢҢ мӢ нҳё лҸ„лӢ¬ м§Җм җмқҖ Lee and Santamarina (2005)к°Җ м ңмӢңн•ң, Fig. 2м—җм„ң Cм җм—җ н•ҙлӢ№н•ҳлҠ” Zero after first bump м§Җм җмқ„ кё°мӨҖмңјлЎң м„ м •н•ҳмҳҖлӢӨ.
2.2.1 PнҢҢ мҶҚлҸ„ мёЎм •
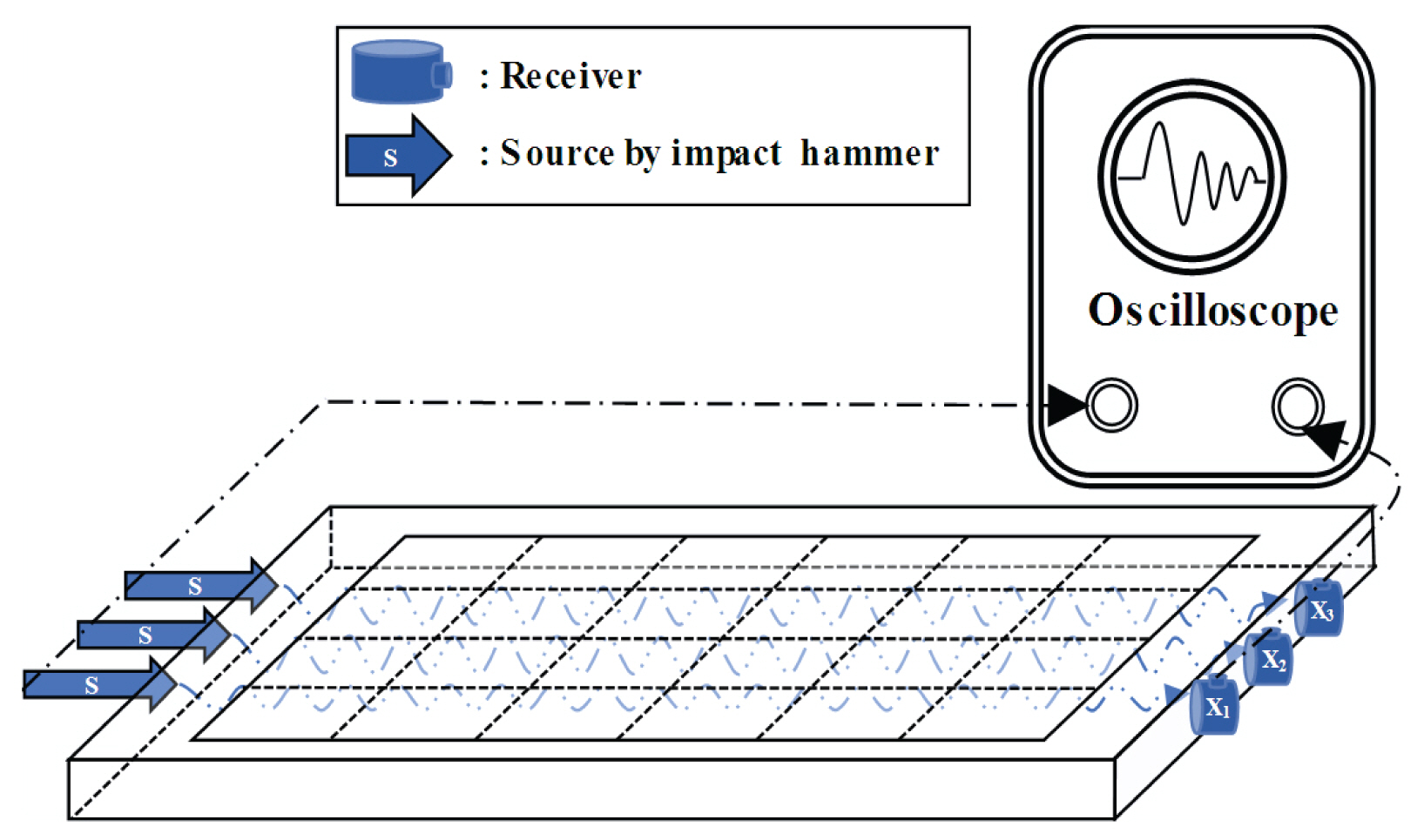
PнҢҢлҠ” мӢңнҺёмқҳ мёЎл©ҙл¶Җм—җ 충격мқ„ л°ңмғқмӢңнӮӨкі л°ҳлҢҖнҺё л©ҙм—җм„ң мӢ нҳёлҘј нҡҚл“қн•ҳмҳҖлӢӨ(Fig. 3). м •нҷ•н•ң PнҢҢ мҶҚлҸ„ мёЎм •мқ„ мң„н•ҙ мӢңнҺё мёЎл©ҙм—җ м„ё кө¬м—ӯмқ„ м„Өм •н•ҳмҳҖмңјл©°, к°Ғ кө¬м—ӯм—җм„ң 5нҡҢм”© к°Җ진н•ҳм—¬ мҙқ 15лІҲ PнҢҢ мҶҚлҸ„лҘј мёЎм •н•ҳмҳҖлӢӨ.
лӘЁл“ мёЎм •кө¬м—ӯм—җм„ң мӢ нҳёк°Җ진л§қм№ҳ(source)мҷҖ м„јм„ң(receiver) к°„ кұ°лҰ¬лҠ” 70 cmмқҙл©°, к°Ғ мёЎм •кө¬м—ӯ(X1, X2, X3)м—җм„ң нҡҚл“қлҗң нҸүк· PнҢҢ мҶҚлҸ„мҷҖ н‘ңмӨҖнҺём°Ё(SD)лҠ” лӢӨмқҢкіј к°ҷлӢӨ. X1мқҖ 3,371 m/s(SD: 67 m/s), X2лҠ” 3,318 m/s(SD: 116 m/s), X3мқҖ 3,412 m/s(SD: 87 m/s)мқҙлӢӨ. мӨҖ비лҗң нҷ”к°•м•” мӢңнҺёмқҳ PнҢҢ мҶҚлҸ„мқҳ м „мІҙ нҸүк· к°’мқҖ 3,367 m/s(SD: 90 m/s)мқҙл©° ліё м—°кө¬м—җм„ңлҠ” мқҙ к°’мқ„ лҢҖн‘ңк°’мңјлЎң мӮ¬мҡ©н•ҳмҳҖлӢӨ.
2.2.2 н‘ңл©ҙнҢҢ мҶҚлҸ„ мёЎм •
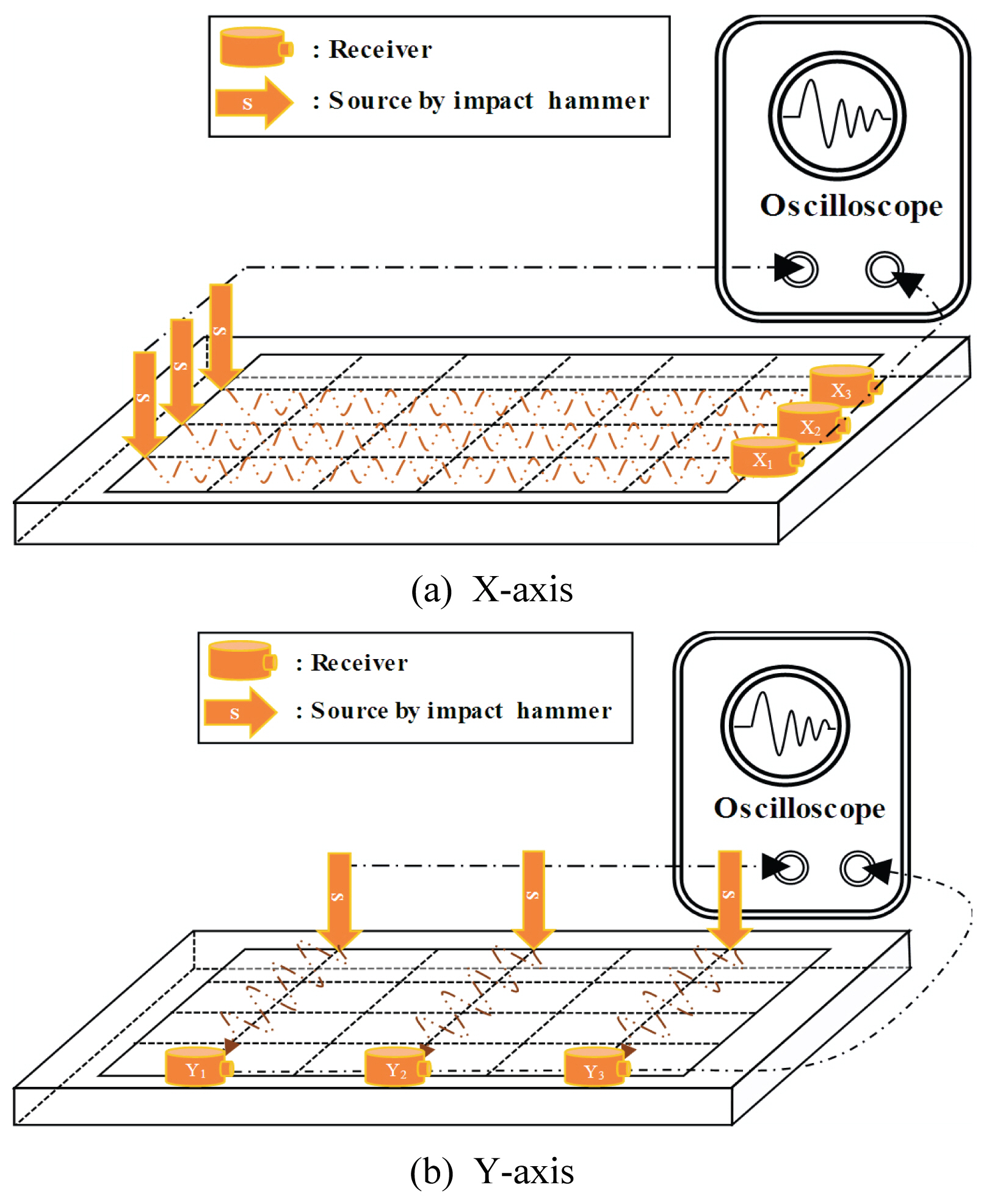
н‘ңл©ҙнҢҢ мҶҚлҸ„лҠ” нҷ”к°•м•” мӢңнҺёмқҳ мғҒл¶Җн‘ңл©ҙм—җм„ң мӢ нҳёк°Җ진л§қм№ҳлҘј мқҙмҡ©н•ҳм—¬ 충격мқ„ к°Җн•ҳкі к°ҷмқҖ л©ҙ н‘ңл©ҙм—җм„ң мӢ нҳёлҘј мёЎм •н•ҳлҠ” л°©мӢқмңјлЎң кө¬н•ҳмҳҖлӢӨ. мӢңнҺёмқҳ л°©н–Ҙм„ұмқ„ нҷ•мқён•ҳкё° мң„н•ҙм„ң мӢңнҺёмқҳ X축 л°©н–Ҙкіј Y축 л°©н–Ҙм—җм„ң к°Ғк°Ғ 3кө¬м—ӯмқ„ м„Өм •н•ҳмҳҖлӢӨ(Fig. 4). Table 1мқҖ н‘ңл©ҙнҢҢ мҶҚлҸ„ мёЎм • кө¬м—ӯлі„ к°Җ진 мң„м№ҳмҷҖ м„јм„ң мң„м№ҳлҘј ліҙм—¬мӨҖлӢӨ. X축 л°©н–Ҙ(X1, X2, X3) мёЎм •мқҖ 6 cm к°„кІ©мңјлЎң мёЎм •лҗҳм—Ҳмңјл©°, Y축 л°©н–ҘмңјлЎң м „нҢҢлҗҳлҠ” мӮ¬лЎҖ(Y1, Y2, Y3)лҠ” 20 cm к°„кІ©мңјлЎң мёЎм •лҗҳм—ҲлӢӨ. к°Ғ кө¬м—ӯм—җм„ң 3нҡҢ л°ҳліөмӢӨн—ҳмқ„ нҶөн•ҙ к°Ғ 9нҡҢм”© н‘ңл©ҙнҢҢ мҶҚлҸ„лҘј мёЎм •н•ҳмҳҖлӢӨ.
X축 л°©н–Ҙм—җм„ңлҠ” X1 2,645 m/s(SD: 90 m/s), X2 2,543 m/s(SD: 58 m/s), X3 2,543 m/s(SD: 45 m/s)лЎң мёЎм •лҗҳм—ҲлӢӨ. Y축 л°©н–Ҙ н‘ңл©ҙнҢҢ мҶҚлҸ„лҠ” Y1м—җм„ң 2,351 m/s(SD: 10 m/s), Y2 2,392 m/s(SD: 17 m/s), Y3 2,370 m/s(SD: 51 m/s)лЎң мёЎм •лҗҳм—ҲлӢӨ. м •лҰ¬н•ҳл©ҙ X축 л°©н–Ҙ н‘ңл©ҙнҢҢ мҶҚлҸ„ нҸүк· мқҖ 2,577 m/s, Y축 л°©н–Ҙ н‘ңл©ҙнҢҢ мҶҚлҸ„ нҸүк· мқҖ 2,371 m/sмқҙл©°, нғ„м„ұнҢҢк°Җ м „нҢҢлҗҳлҠ” л°©н–Ҙм—җ л”°лҘё н‘ңл©ҙнҢҢ мҶҚлҸ„ м°ЁмқҙлҠ” м•Ҫ 10% м •лҸ„лЎң м°Ёмқҙк°Җ нҒ¬м§Җ м•ҠмқҖ кІғмңјлЎң нҷ•мқён•ҳмҳҖлӢӨ. ліё м—°кө¬м—җм„ңлҠ” н•ҙлӢ№ нҷ”к°•м•”мқҳ н‘ңл©ҙнҢҢ мҶҚлҸ„лЎң л‘җ л°©н–Ҙмқҳ нҸүк· к°’мқё 2,473 m/s(SD: 45 m/s)лҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ.
2.3 мӢӨн—ҳ мһҘ비 л°Ҹ л°©лІ•
ліё м—°кө¬м—җм„ңлҠ” м„јм„ң л°°м—ҙ(к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬)м—җ л”°лқј лӢ¬лқјм§ҖлҠ” нғ„м„ұнҢҢ мҶҚлҸ„лҘј нҷ•мқён•ҳкё° мң„н•ң мӢӨн—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. м„јм„ң л°°м—ҙм—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„ мёЎм •мқ„ мң„н•ҙ Fig. 5мҷҖ к°ҷмқҙ мӢӨн—ҳ мһҘм№ҳлҘј кө¬м„ұн•ҳмҳҖлӢӨ. лҳҗн•ң кІ°м •лҗң м„јм„ң л°°м—ҙ мӮ¬лЎҖм—җ л”°лқј к°ҖмҶҚлҸ„кі„лҘј 3кө°лҚ° м„Өм№ҳн•ҳмҳҖмңјл©°, мқјм •н•ң мң„м№ҳ(мҶҗмғҒ мң„м№ҳлЎң к°Җм •)м—җм„ң мӢ нҳёк°Җ진л§қм№ҳлҘј мқҙмҡ©н•ҳм—¬ мқҢмӣҗмқ„ л°ңмғқмӢңмјң мӢңнҺём—җ м„Өм№ҳлҗң к°ҖмҶҚлҸ„кі„лЎң мӢ нҳёлҘј мҲҳмӢ н•ҳмҳҖлӢӨ. к°ҖмҶҚлҸ„кі„м—җм„ң нҡҚл“қн•ң мӢ нҳёлҠ” мӢ нҳё мҰқнҸӯ мһҘм№ҳ(PCB: 482C16)м—җм„ң 40 dB мҰқнҸӯмӢңмјң лҚ°мқҙн„° мҲҳ집мһҘм№ҳ(DSOX-2014A)м—җм„ң м ҖмһҘн•ҳмҳҖлӢӨ. нҡҚл“қлҗң м„јм„ң л°°м—ҙм—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„лҠ” лҜёлҰ¬ нҷ•мқёлҗң мӢңнҺёмқҳ PнҢҢ мҶҚлҸ„ л°Ҹ н‘ңл©ҙнҢҢ мҶҚлҸ„мҷҖ 비көҗ분м„қн•ҳм—¬ мҶҗмғҒмң„м№ҳ м¶”м • м •нҷ•лҸ„лҘј 분м„қн•ҳмҳҖлӢӨ.
2.4 мӢӨн—ҳ мӮ¬лЎҖ м„ м •
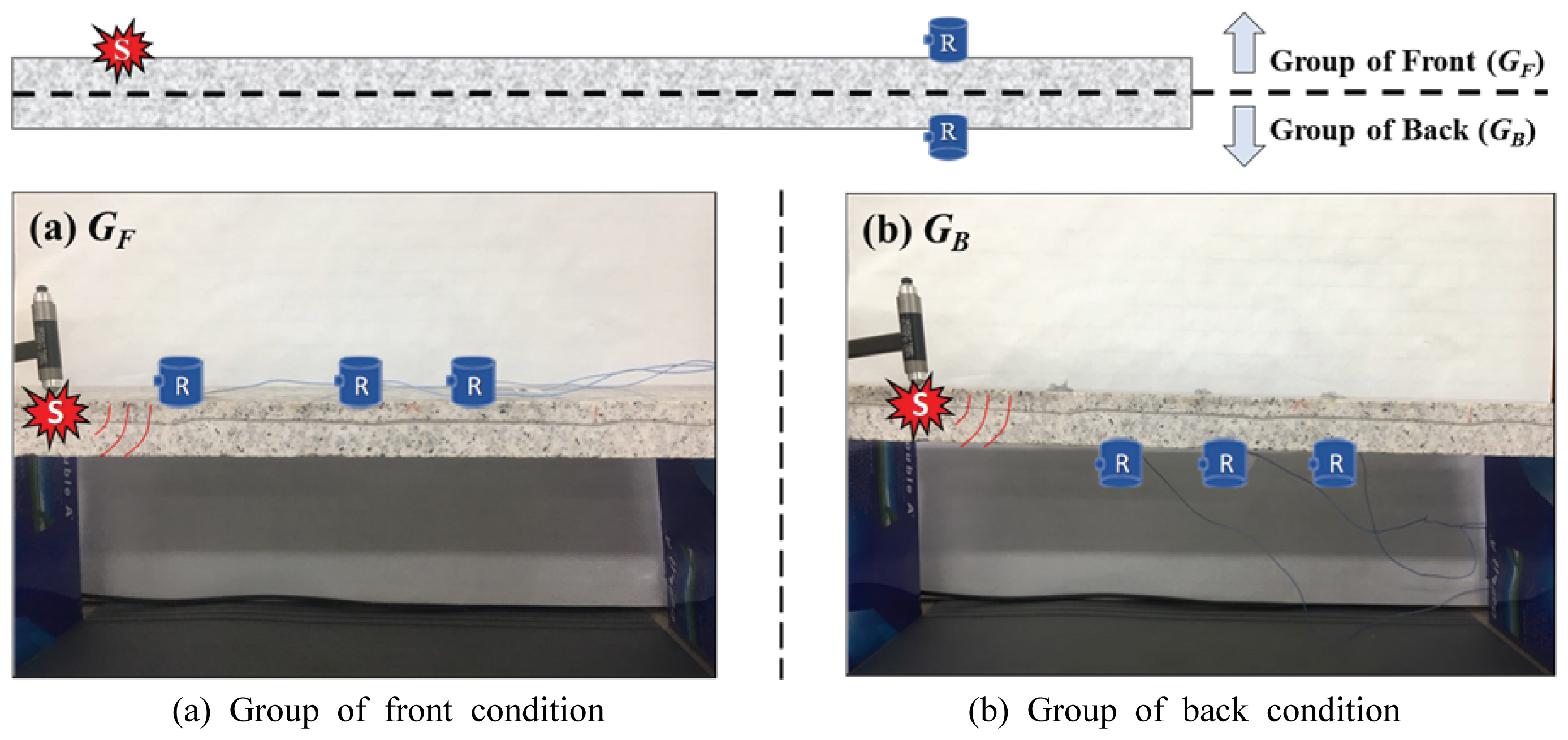
м„јм„ң л°°м—ҙ(к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬)м—җ л”°лҘё мӢӨн—ҳмқҖ 5к°ң мӮ¬лЎҖ(CA1~CA5)мқҙл©°, нғҖкІ©л©ҙ м°Ёмқҙм—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„ нҠ№м„ұмқ„ нҷ•мқён•ҳкё° мң„н•ҙ Fig. 6кіј к°ҷмқҙ к°Ғ мӮ¬лЎҖлі„лЎң м•һл©ҙ(лҸҷмқјл©ҙ)кіј м•һл’·л©ҙ(лӢӨлҘё л©ҙ)м—җм„ң к°Җ진 мӢӨн—ҳмқ„ мӢӨмӢңн•ҳмҳҖлӢӨ.
2.4.1 нғҖкІ©л©ҙм—җ л”°лҘё мӢӨн—ҳкө° кө¬л¶„
нғҖкІ©л©ҙм—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„ нҠ№м„ұмқ„ нҷ•мқён•ҳкё° мң„н•ҙ мӢӨн—ҳкө°мқ„ кө¬л¶„н•ҳмҳҖлӢӨ. к°Җ진мӣҗкіј м„јм„ңк°Җ к°ҷмқҖ л©ҙм—җ мһҲлҠ” мӢӨн—ҳ мӮ¬лЎҖлҘј м•һл©ҙ к·ёлЈ№(GF, Group of Front)мңјлЎң м •мқҳн•ҳкі (Fig. 6a), к°Җ진мӣҗкіј м„јм„ңлҘј м„ңлЎң лӢӨлҘё л©ҙм—җ м„Өм№ҳн•ң мӢӨн—ҳ мӮ¬лЎҖлҘј л’·л©ҙ к·ёлЈ№(GB, Group of Back)мңјлЎң м •мқҳн•ҳмҳҖлӢӨ(Fig. 6b). GF мӢӨн—ҳкө°мқҳ кІҪмҡ°, к°Җ진л©ҙкіј мёЎм •л©ҙмқҙ лҸҷмқјн•ҳкё° л•Ңл¬ём—җ н‘ңл©ҙнҢҢ нҠ№м„ұмқҙ мЈјлҸ„м Ғмқј кІғмңјлЎң к°Җм •н•ҳмҳҖлӢӨ. л°ҳл©ҙ GB мӢӨн—ҳкө°мқҳ кІҪмҡ° к°Җ진л©ҙкіј мёЎм •л©ҙмқҙ лӢӨлҘҙл©ҙ нғ„м„ұнҢҢлҠ” мӢңнҺё лӮҙл¶ҖлҘј кұ°міҗ м „нҢҢлҗҳкё° л•Ңл¬ём—җ мқҙл•Ң нҡҚл“қлҗҳлҠ” нғ„м„ұнҢҢлҠ” PнҢҢ нҠ№м„ұмқ„ к°Җм§Ҳ кІғмңјлЎң к°Җм •н•ҳмҳҖлӢӨ.
2.4.2 м„јм„ң л°°м—ҙм—җ л”°лҘё мӢӨн—ҳ мӮ¬лЎҖ
мӢӨн—ҳ мӮ¬лЎҖлҠ” л‘җ к°Җм§Җ л°©лІ•мңјлЎң лӮҳлҲ„м–ҙ м„јм„ң л°°м—ҙмқ„ кІ°м •н•ҳмҳҖлӢӨ. мІ«м§ёлҠ” м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқҖ мқјм •н•ҳкІҢ мң м§Җн•ҳл©° м„јм„ңмҷҖ к°Җ진 мң„м№ҳмқҳ кұ°лҰ¬к°Җ м җм җ мҰқк°Җн•ҳлҠ” кІҪмҡ°мқҙл©°, л‘ҳм§ёлҠ” м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқҙ мҰқк°Җн•ҳл©° ліҖнҷ”н•ҳлҠ” кІҪмҡ°мқҙлӢӨ.
мӢӨн—ҳ мӮ¬лЎҖ кІ°м •м—җ мһҲм–ҙ кё°мӨҖ мӮ¬лЎҖлҘј CA-1мңјлЎң м •мқҳн•ҳмҳҖлӢӨ. CA-1 мјҖмқҙмҠӨмқҳ к°Җ진мһҘм№ҳ мўҢн‘ңлҠ” (10, 12, 0)мқҙл©°, м„јм„ңмқҳ мң„м№ҳмўҢн‘ңлҠ” R1(20, 6, 0), R2(30, 24, 0), R3(40, 12, 0)мқҙлӢӨ. CA-1мқ„ кё°мӨҖмңјлЎң м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқ„ мқјм •н•ҳкІҢ мң м§Җн•ҳл©° м„јм„ң-к°Җ진мӣҗ к°„мқҳ кұ°лҰ¬лҘј мҰқк°ҖмӢңмј°лӢӨ(Fig. 7a). мҰү, CA-1 пҝ« CA-2 пҝ« CA-3 мҲңм„ңлЎң мӢӨн—ҳмқ„ 진н–үн•ҳмҳҖмңјл©°, CA-2мҷҖ CA-3мқҖ м„јм„ң к°„мқҳ к°„кІ©мқҙ лҸҷмқјн•ң мЎ°кұҙм—җм„ң м„јм„ң л°°м—ҙкө°(array group) м „мІҙк°Җ мҳӨлҘёмӘҪ л°©н–ҘмңјлЎң 10 cmм”© мқҙлҸҷн•ҳлҠ” кІҪмҡ°мқҙлӢӨ.
м„јм„ң л°°м—ҙ ліҖнҷ”м—җм„ңлҠ” CA-1 мӮ¬лЎҖлҘј кё°мӨҖмңјлЎң R3 м„јм„ңл§Ң мқҙлҸҷмӢңмј°лӢӨ. к°Җ진 мң„м№ҳ(10, 12, 0) л°Ҹ R1 к·ёлҰ¬кі R2 м„јм„ң мң„м№ҳлҠ” кі м •мқҙл©°, R3 м„јм„ңлҠ” мҳӨлҘёмӘҪ л°©н–ҘмңјлЎң 10 cmм”© мқҙлҸҷн•ҳмҳҖлӢӨ. н•ҙлӢ№ мӢӨн—ҳ мӮ¬лЎҖлҠ” CA-1 пҝ« CA-4 пҝ« CA-5 мҲңм„ңлЎң мӢӨмӢңн•ҳмҳҖлӢӨ(Fig. 7b). к°Ғ мӢӨн—ҳ мӮ¬лЎҖм—җм„ң лҸҷмқјл©ҙ(GF)кіј м•һл’·л©ҙ(GB)мқҳ нғҖкІ© мӢӨн—ҳкө°мңјлЎң лӮҳлҲ„м–ҙ мӢӨн—ҳмқ„ мӢӨмӢңн•ҳмҳҖлӢӨ. ліё м—°кө¬м—җм„ң мҲҳн–үн•ң мӢӨн—ҳ мӮ¬лЎҖмқҳ к°Җ진мӣҗ л°Ҹ м„јм„ң мң„м№ҳ мўҢн‘ңлҠ” Table 2мҷҖ к°ҷлӢӨ.
3. м„јм„ң л°°м—ҙм—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„ мёЎм • кІ°кіј
м„јм„ң л°°м—ҙм—җ л”°лҘё мӢӨн—ҳм—җм„ң нғ„м„ұнҢҢ мҶҚлҸ„лҘј мёЎм •н•ҳмҳҖмңјл©°, м•һл©ҙм—җм„ң к°Җ진н•ң к·ёлЈ№(GF)кіј л’·л©ҙм—җм„ң к°Җ진н•ң к·ёлЈ№(GB)мңјлЎң лӮҳлҲ„м–ҙ кІ°кіјлҘј м •лҰ¬н•ҳмҳҖлӢӨ(Fig. 8). м•һл©ҙм—җм„ң к°Җ진н•ң к·ёлЈ№м—җм„ң к°Ғк°Ғмқҳ м„јм„ңлЎңл¶Җн„° мёЎм •лҗң нғ„м„ұнҢҢ мҶҚлҸ„мқҳ нҸүк· к°’мқҖ 2,807 m/sмқҙл©°(Fig. 8a), м•һл©ҙ мӢӨн—ҳкө°мқҳ мөңлҢҖ нғ„м„ұнҢҢ мҶҚлҸ„лҠ” 3,607 m/s, мөңмҶҢ нғ„м„ұнҢҢ мҶҚлҸ„лҠ” 2,354 m/sлЎң 분м„қлҗҳм—ҲлӢӨ. м•һл©ҙ к·ёлЈ№мқҳ н‘ңмӨҖнҺём°ЁлҠ” к°ҷмқҖ мӢӨн—ҳ мӢңнҺёмІҙмһ„м—җлҸ„ м„јм„ң л°°м—ҙм—җ л”°лқј 336 m/sлқјлҠ” лӢӨмҶҢ нҒ° к°’мқҙ нҷ•мқёлҗҳм—ҲлӢӨ.
л’·л©ҙм—җм„ң к°Җ진н•ң к·ёлЈ№мқҳ кІҪмҡ°, нҸүк· нғ„м„ұнҢҢ мҶҚлҸ„лҠ” 2,355 m/sлЎң м•һл©ҙ к·ёлЈ№кіј 비көҗн•ҳм—¬ мң мӮ¬н•ң к°’мңјлЎң 분м„қлҗҳм—ҲлӢӨ. Fig. 8bлҠ” л’·л©ҙ к°Җ진 к·ёлЈ№м—җм„ң мёЎм •лҗң нғ„м„ұнҢҢ мҶҚлҸ„лҘј ліҙм—¬мӨҖлӢӨ. м—¬кё°м„ң мөңлҢҖ нғ„м„ұнҢҢ мҶҚлҸ„лҠ” 3,056 m/sмқҙкі мөңмҶҢ нғ„м„ұнҢҢ мҶҚлҸ„лҠ” 1,791 m/sлЎң 분м„қлҗҳм—ҲлӢӨ. л’·л©ҙ к°Җ진 к·ёлЈ№м—җм„ң нҡҚл“қлҗң нғ„м„ұнҢҢ мҶҚлҸ„мқҳ н‘ңмӨҖнҺём°ЁлҠ” 404 m/sлЎң м•һл©ҙ к·ёлЈ№ліҙлӢӨ лӢӨмҶҢ нҒ¬лӢӨ. мқҙмҷҖ к°ҷмқҖ кІ°кіјлҠ” мң„м№ҳм¶”м •мқ„ мң„н•ң нғ„м„ұнҢҢ мҶҚлҸ„ кІ°м • мӢң мЈјмқҳн•ҙм•ј н•Ёмқ„ ліҙм—¬мӨҖлӢӨ. л§Ңм•Ҫ н•ҳлӮҳмқҳ кі м •лҗң к°’(нҸүк· к°’ л“ұ)мқ„ мӮ¬мҡ©н•ңлӢӨл©ҙ м„јм„ң л°°м—ҙм—җ л”°лҘё н‘ңмӨҖнҺём°Ёк°Җ нҒ¬кё° л•Ңл¬ём—җ м •нҷ•н•ң мң„м№ҳм¶”м •мқ„ н• мҲҳ м—Ҷмқ„ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
3.1 GF мЎ°кұҙм—җм„ң кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„
Fig. 8мқҳ нғ„м„ұнҢҢ мҶҚлҸ„лҘј к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬м—җ л”°лқј м •лҰ¬н•ҳл©ҙ мқјм •н•ң кІҪн–Ҙм„ұмқҙ мһҲмқҢмқ„ м•Ң мҲҳ мһҲлӢӨ. м•һл©ҙм—җм„ң к°Җ진н•ң к·ёлЈ№мқҳ мӢӨн—ҳкІ°кіј(Fig. 8a)лҘј к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬м—җ л”°лқј Fig. 9м—җ лӮҳнғҖлӮҙм—Ҳмңјл©°, к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬к°Җ мҰқк°Җн•Ём—җ л”°лқј нғ„м„ұнҢҢ мҶҚлҸ„к°Җ м җм°Ё к°җмҶҢн•ҳлҠ” кІғмңјлЎң нҷ•мқёлҗҳм—ҲлӢӨ. н•ҙлӢ№ мӢӨн—ҳк°’мқҖ м§ҖмҲҳн•ЁмҲҳ мғҒкҙҖкҙҖкі„м—җм„ң лҶ’мқҖ мғҒкҙҖм„ұмқ„ ліҙмҳҖлӢӨ. кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„мқҳ кҙҖкі„лҘј м§ҖмҲҳн•ЁмҲҳлЎң м •мқҳн•ҳл©ҙ м§ҖмҲҳн•ЁмҲҳмқҳ мғҒмҲҳлҠ” 2100.4, к·ёлҰ¬кі м§ҖмҲҳлҠ” вҖ“0.21мқҙлӢӨ. мқҙл•Ң кІ°м •кі„мҲҳ(R2)лҠ” 0.82лЎң мғҒлҢҖм ҒмңјлЎң лҶ’мқҖ мғҒкҙҖкҙҖкі„лҘј ліҙмҳҖлӢӨ.
3.2 GB мЎ°кұҙм—җм„ң кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„
Fig. 10м—җ л’·л©ҙм—җм„ң к°Җ진н•ң к·ёлЈ№мқҳ нғ„м„ұнҢҢ мҶҚлҸ„мҷҖ к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬ кҙҖкі„лҘј лӮҳнғҖлӮҙм—ҲлӢӨ. л’·л©ҙм—җм„ң к°Җ진н•ң мӢӨн—ҳкө° м—ӯмӢң к°Җ진мӣҗ-м„јм„ң к°„ кұ°лҰ¬к°Җ мҰқк°Җн•Ём—җ л”°лқј нғ„м„ұнҢҢ мҶҚлҸ„к°Җ к°җмҶҢн•ҳмҳҖлӢӨ. мғҒкҙҖкҙҖкі„лҘј м§ҖмҲҳн•ЁмҲҳлЎң лӮҳнғҖлӮҙл©ҙ мғҒмҲҳк°Җ 1596.4, м§ҖмҲҳк°Җ вҖ“0.28мқј л•Ң к°ҖмһҘ лҶ’мқҖ мғҒкҙҖкҙҖкі„(R2=0.66)мқё кІғмңјлЎң нҷ•мқёлҗҳм—ҲлӢӨ. GF мЎ°кұҙм—җм„ң к°Җ진мқ„ мҲҳн–үн•ң кІҪмҡ°мҷҖ 비көҗн–Ҳмқ„ л•Ң кІ°м •кі„мҲҳк°Җ лӢӨмҶҢ лӮ®мқҖлҚ°, мқҙлҹ¬н•ң кІ°кіјлҠ” л’·л©ҙ к°Җ진 мӢң нғ„м„ұнҢҢк°Җ л§Өм§Ҳ(нҷ”к°•м•” мӢңнҺё)мқ„ нҶөкіјн•ҳл©ҙм„ң л§Өм§Ҳмқҳ л¶Ҳк· м§Ҳн•ң нҠ№м„ұмқҙ л°ҳмҳҒлҗҳм—Ҳкё° л•Ңл¬ёмңјлЎң нҢҗлӢЁлҗңлӢӨ.
4. к°Җ진мӣҗкіј м„јм„ңкұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„ м Ғмҡ©
нҷ”к°•м•” мӢңнҺёмқ„ лҢҖмғҒмңјлЎң мҲҳн–үн•ң мӢӨн—ҳм—җм„ң к°Җ진мӣҗкіј м„јм„ң кұ°лҰ¬м—җ л”°лқј нғ„м„ұнҢҢ мҶҚлҸ„к°Җ к°җмҶҢн•ҳлҠ” кІғмңјлЎң 분м„қлҗңлӢӨ(Figs. 9 and 10). мқҙмҷҖ к°ҷмқҖ кІ°кіјлҠ” мң„м№ҳм¶”м • мӢң лӢЁмқј мҶҚлҸ„(PнҢҢ мҶҚлҸ„ лҳҗлҠ” н‘ңл©ҙнҢҢ мҶҚлҸ„)к°’мқ„ м Ғмҡ©н•ңлӢӨл©ҙ мң„м№ҳм¶”м •мқҳ м •нҷ•лҸ„к°Җ к°җмҶҢн• мҲҳ мһҲмқҢмқ„ ліҙм—¬мӨҖлӢӨ. ліё мһҘм—җм„ңлҠ” 3к°Җм§Җ нғ„м„ұнҢҢ мҶҚлҸ„лӘЁл“ң(PнҢҢ мҶҚлҸ„, н‘ңл©ҙнҢҢ мҶҚлҸ„, к·ёлҰ¬кі кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„)лҘј мң„м№ҳм¶”м •м—җ м Ғмҡ©н–Ҳмқ„ л•Ң мӢӨм ң мң„м№ҳмҷҖ м–јл§ҲлӮҳ м°Ёмқҙк°Җ л°ңмғқн•ҳлҠ”м§Җ 분м„қн•ҳмҳҖлӢӨ.
4.1 м •нҷ•лҸ„ м§Җн‘ң
ліё м—°кө¬м—җм„ңлҠ” мң„м№ҳм¶”м •мқҳ м •нҷ•лҸ„лҘј нҸүк°Җн•ҳкё° мң„н•ҙм„ң м •нҷ•лҸ„ м§Җн‘ң(FC)лҘј м •мқҳн•ҳмҳҖлӢӨ. м •нҷ•лҸ„ м§Җн‘ңлҠ” мӢӨм ң(кё°мӨҖ)мӢ нҳёмқҳ лҸ„лӢ¬мӢңк°„кіј мһ…л Ҙлҗң мӢ нҳёмқҳ лҸ„лӢ¬мӢңк°„мқҳ м°Ёмқҙ к°ңл…җмқ„ мқҙмҡ©н•ҳм—¬ кі„мӮ°н•ңлӢӨ. м—¬кё°м„ң мһ…л Ҙлҗң мӢ нҳёмқҳ лҸ„лӢ¬мӢңк°„мқҖ PнҢҢ мҶҚлҸ„ лҳҗлҠ” н‘ңл©ҙнҢҢ мҶҚлҸ„лҘј м Ғмҡ©н•ҳмҳҖмқ„ л•Ңмқҳ кі„мӮ°лҗң лҸ„лӢ¬мӢңк°„мқҙлӢӨ. л”°лқјм„ң мӢӨм ң лҸ„лӢ¬мӢңк°„м—җ к°Җк№ҢмҡёмҲҳлЎқ м •нҷ•лҸ„ м§Җн‘ңлҠ” 0м—җ к°Җк№Ңмҡҙ к°’мқ„ к°Җм§ҖкІҢ лҗңлӢӨ. Eq. (1)мқҖ 3к°ңмқҳ м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ FCлҘј мӮ°м •н•ҳлҠ” мӢқмқҙлӢӨ.
м—¬кё°м„ң, вҲҶTABm, вҲҶTBCm, вҲҶTCAmмқҖ мӢӨм ң(кё°мӨҖ) нғ„м„ұнҢҢ мҶҚлҸ„лҘј мқҙмҡ©н•ң м„јм„ңк°„мқҳ мӢңк°„м°Ё, вҲҶTABi, вҲҶTBCi, вҲҶTCAiлҠ” мһ…л Ҙ нғ„м„ұнҢҢ мҶҚлҸ„лҘј мқҙмҡ©н•ң м„јм„ңк°„мқҳ мӢңк°„м°Ё, NмқҖ м„јм„ңмқҳ к°ңмҲҳ.
4.2 мҶҚлҸ„лӘЁл“ңм—җ л”°лҘё м •нҷ•лҸ„ 분м„қ
4.2.1 к°Җ진мӣҗкіј м„јм„ңк°Җ к°ҷмқҖл©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(GF)
Fig. 11aлҠ” GF мЎ°кұҙм—җм„ң мһ…л Ҙ нғ„м„ұнҢҢ мҶҚлҸ„лҘј PнҢҢ(Vp), н‘ңл©ҙнҢҢ(Vsur), к·ёлҰ¬кі , ліё м—°кө¬м—җм„ң м ңм•Ҳн•ң кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ(Vm)лҘј кё°мӨҖмңјлЎң н–Ҳмқ„ л•Ң мң„м№ҳм¶”м • м •нҷ•лҸ„лҘј ліҙм—¬мӨҖлӢӨ. м •нҷ•лҸ„ 분м„қ кІ°кіј, кұ°лҰ¬м—җ л”°лқј ліҖнҷ”н•ҳлҠ” нғ„м„ұнҢҢ мҶҚлҸ„лҘј мһ…л Ҙн•ҳмҳҖмқ„ л•Ң м •нҷ•лҸ„к°Җ к°ҖмһҘ лҶ’лӢӨ(3.6~7.7 Ојs). н‘ңл©ҙнҢҢ мҶҚлҸ„лҘј м Ғмҡ©н•ҳмҳҖмқ„ л•Ңмқҳ м •нҷ•лҸ„лҠ” PнҢҢ мҶҚлҸ„лҘј м Ғмҡ©н•ҳмҳҖмқ„ л•ҢліҙлӢӨ лҶ’мқҖ м •нҷ•лҸ„(лӮ®мқҖ FC) кІ°кіјлҘј ліҙм—¬мЈјлҠ” кІғмңјлЎң 분м„қлҗҳм—ҲлӢӨ. Fig. 11aм—җм„ң PнҢҢ мҶҚлҸ„лҘј м Ғмҡ©н•ҳмҳҖмқ„ л•Ңмқҳ FCлҠ” н‘ңл©ҙнҢҢ мҶҚлҸ„лҘј м Ғмҡ©н•ҳмҳҖмқ„ л•ҢліҙлӢӨ м•Ҫ 2~4л°° м •лҸ„ нҒ° кІғмңјлЎң нҷ•мқёлҗҳм—ҲлӢӨ. мқҙмҷҖ к°ҷмқҖ м •нҷ•лҸ„ м°ЁмқҙлҠ” н•ҙлӢ№ мӢӨн—ҳмқҙ к°Җ진мӣҗкіј м„јм„ңк°Җ к°ҷмқҖ л©ҙм—җ л°°м№ҳлҗҳм–ҙ мһҲкё° л•Ңл¬ём—җ н‘ңл©ҙнҢҢ лӘЁл“ңк°Җ м§Җл°°м Ғмқҙкё° л•Ңл¬ёмңјлЎң 분м„қлҗңлӢӨ.
м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқҖ мқјм •н•ҳкІҢ мң м§Җн•ҳл©° к°Җ진мң„м№ҳмқҳ кұ°лҰ¬к°Җ м җм җ мҰқк°Җн•ҳлҠ” м„јм„ң л°°м—ҙмқҳ кІҪмҡ°(CA-1 пҝ« CA-2 пҝ« CA-3), м„јм„ң л°°м—ҙм—җ л”°лҘё FC к°’мқҙ м „л°ҳм ҒмңјлЎң 비мҠ·н•ң к°’мқ„ ліҙмқёлӢӨ. мқҙмҷҖ к°ҷмқҖ кІ°кіјлҠ” м„јм„ңмқҳ к°„кІ©мқҙ лҸҷмқјн•ң кІҪмҡ° мң„м№ҳн‘ңм •м—җ лҜјк°җлҸ„к°Җ м ҒмқҖ кІғмңјлЎң 분м„қлҗңлӢӨ. к·ёлҹ¬лӮҳ PнҢҢ мҶҚлҸ„ м Ғмҡ© мӢң м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқҙ ліҖнҷ”н•ҳлҠ” кІҪмҡ°(CA-1 пҝ« CA-4 пҝ« CA-5)м—җлҠ” м„јм„ң к°„мқҳ л°°м—ҙк°„кІ©мқҙ мҰқк°Җн•Ём—җ л”°лқј м •нҷ•лҸ„к°Җ к°җмҶҢн•Ё(FC мҰқк°Җ)мқ„ нҷ•мқён• мҲҳ мһҲлӢӨ.
4.2.2 к°Җ진мӣҗкіј м„јм„ңк°Җ лӢӨлҘёл©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(GB)
Fig. 11bлҠ” к°Җ진мӣҗкіј м„јм„ңк°Җ м„ңлЎң лӢӨлҘё л©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(GB)мқҳ мң„м№ҳм¶”м • м •нҷ•лҸ„ м§Җн‘ңлҘј ліҙм—¬мӨҖлӢӨ. к°Җ진мӣҗкіј м„јм„ңк°Җ к°ҷмқҖ л©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(GF)мҷҖ 비көҗн•ҳм—¬ лӘЁл“ мҶҚлҸ„лӘЁл“ңм—җм„ң м •нҷ•лҸ„к°Җ к°җмҶҢ(FC мҰқк°Җ)н•ң кІғмқ„ нҷ•мқён• мҲҳ мһҲлӢӨ. нҠ№нһҲ н‘ңл©ҙнҢҢлҘј мһ…л Ҙк°’мңјлЎң м§Җм •н•ң кІҪмҡ° м •нҷ•лҸ„к°Җ нҷ•м—°нһҲ к°җмҶҢн•ҳмҳҖлӢӨ. мқҙлҠ” к°Җ진мӣҗкіј м„јм„ңк°Җ лӢӨлҘё л©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(нҠ№нһҲ л‘җк»ҳк°Җ мҰқк°Җн• мҲҳлЎқ) н‘ңл©ҙнҢҢ нҠ№м„ұмқҙ к°җмҶҢн•ҳкё° л•Ңл¬ёмңјлЎң 분м„қлҗңлӢӨ. лӘЁлҚё мҶҚлҸ„(кұ°лҰ¬м—җ л”°лҘё нғ„м„ұнҢҢ мҶҚлҸ„ мғҒкҙҖкҙҖкі„)лҘј мһ…л Ҙк°’мңјлЎң м„Өм •н•ҳл©ҙ PнҢҢмҷҖ н‘ңл©ҙнҢҢлҘј мһ…л Ҙк°’мңјлЎң м„Өм •н• л•ҢліҙлӢӨ мң„м№ҳн‘ңм • м •нҷ•лҸ„к°Җ мҰқк°Җ(FC к°җмҶҢ)н•Ёмқ„ м•Ң мҲҳ мһҲлӢӨ. 비лЎқ к°Җ진мӣҗкіј м„јм„ңк°Җ лӢӨлҘё л©ҙм—җ л°°м№ҳлҗҳм–ҙ м „мІҙм Ғмқё мң„м№ҳм¶”м • м •нҷ•лҸ„к°Җ к°җмҶҢн•ҳлҚ”лқјлҸ„ лӢЁмқј мҶҚлҸ„лҘј м Ғмҡ©н•ҳлҠ” кІғліҙлӢӨ лӘЁлҚё мҶҚлҸ„лҘј м Ғмҡ©н•ҳлҠ” кІғмқҙ м •нҷ•н•ң мң„м№ҳм¶”м •м—җ мң лҰ¬н•ң кІғмңјлЎң 분м„қлҗҳм—ҲлӢӨ.
н•ңнҺё лӘЁл“ мҶҚлҸ„лӘЁл“ңм—җм„ң м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқҖ мқјм •н•ҳкІҢ мң м§Җн•ҳл©° к°Җ진мӣҗ мң„м№ҳмқҳ кұ°лҰ¬к°Җ м җм җ мҰқк°Җн•ҳлҠ” м„јм„ң л°°м—ҙмқҳ кІҪмҡ°(CA-1 пҝ« CA-2 пҝ« CA-3) л°Ҹ м„јм„ң к°„мқҳ л°°м—ҙ к°„кІ©мқҙ ліҖнҷ”н•ҳлҠ” кІҪмҡ°(CA-1 пҝ« CA-4 пҝ« CA-5)м—җм„ң м„јм„ң к°„мқҳ л°°м—ҙк°„кІ©мқҙ л©Җм–ҙм§җм—җ л”°лқј м •нҷ•лҸ„к°Җ к°җмҶҢ(FC мҰқк°Җ)н•ҳмҳҖлӢӨ. мқҙмҷҖ к°ҷмқҖ кІ°кіјлҠ” GF мЎ°кұҙліҙлӢӨ GB мЎ°кұҙм—җм„ң м„јм„ң л°°м—ҙм—җ л”°лҘё м •нҷ•лҸ„к°Җ лҜјк°җн•ҳкІҢ ліҖн• мҲҳ мһҲмқҢмқ„ ліҙм—¬мӨҖлӢӨ.
4.3 мң„м№ҳм¶”м • мҳӨм°ЁлІ”мң„ 분м„қ
FCлҠ” мқјм • мӢ нҳёмқҳ н‘ңмӨҖ мҳӨм°ЁмӢңк°„мқ„ мқҳлҜён•ҳкё° л•Ңл¬ём—җ, FC к°’мқ„ мқҙмҡ©н•ҳм—¬ мӢӨм ң л§Өм§Ҳмқҳ нғ„м„ұнҢҢмқҳ нҸүк· мҶҚлҸ„лҘј кіұн•ҳм—¬ мң„м№ҳм¶”м • мҳӨм°ЁлІ”мң„лҘј мӮ°м •н•ҳмҳҖлӢӨ. FCлҠ” л°°м—ҙм—җ л”°лқј лӢӨлҘё к°’мқ„ к°Җм§Җкі мһҲкё° л•Ңл¬ём—җ нҸүк· к°’мқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ. Fig. 12лҠ” к°Ғк°Ғ к°Җ진мӣҗкіј м„јм„ңк°Җ к°ҷмқҖ л©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(GF), м„ңлЎң лӢӨлҘёл©ҙм—җ л°°м№ҳлҗң кІҪмҡ°(GB)мқҳ мӢӨн—ҳмңјлЎңл¶Җн„° мҳҲмёЎлҗң мң„м№ҳм¶”м • мҳӨм°ЁлІ”мң„лҘј ліҙм—¬мӨҖлӢӨ. Fig. 12м—җм„ң кё°мӨҖм җмқё (0,0)мқҖ нғҖкІ©мң„м№ҳлҘј мқҳлҜён•ҳкі н‘ңкё°лҗң мӣҗмқҖ мҳӨм°ЁлІ”мң„лҘј мқҳлҜён•ңлӢӨ. мҳӨм°ЁмңЁ мӮ°м •мқ„ мң„н•ҙ мөңлҢҖ мёЎм •кұ°лҰ¬(к°Җ진мӣҗ-м„јм„ң)мқё 50 cmлҘј кё°мӨҖмңјлЎң к°Ғк°Ғмқҳ мҳӨм°ЁлІ”мң„м—җм„ң мөңлҢҖ мёЎм •кұ°лҰ¬лҘј лӮҳлҲ„м–ҙ л°ұ분мңЁлЎң мӮ°м •н•ҳмҳҖлӢӨ.
GF мЎ°кұҙм—җм„ң PнҢҢ мҶҚлҸ„лҘј мһ…л Ҙк°’мңјлЎң м Ғмҡ©н•ҳл©ҙ м•Ҫ 8.82 cmмқҳ мҳӨм°ЁлІ”мң„к°Җ л°ңмғқн•ҳлҠ” кІғмңјлЎң 분м„қлҗҳм—ҲлӢӨ(Fig. 13a). PнҢҢ мҶҚлҸ„ м Ғмҡ© мӢң мҳӨм°ЁмңЁмқҖ мөңлҢҖ мёЎм •кұ°лҰ¬ 50 cm кё°мӨҖмңјлЎң м•Ҫ 17.6%лЎң мӮ°м •лҗҳм—ҲлӢӨ. н•ңнҺё н‘ңл©ҙнҢҢ мҶҚлҸ„мҷҖ лӘЁлҚё мҶҚлҸ„лҘј мң„м№ҳм¶”м • мһ…л Ҙк°’мңјлЎң мӮ¬мҡ©н•ҳл©ҙ мҳӨм°ЁлІ”мң„лҠ” к°Ғк°Ғ 2.24 cm(мҳӨм°ЁмңЁ 4.5%)мҷҖ 1.44 cm(мҳӨм°ЁмңЁ 2.9%)лЎң мғҒлҢҖм ҒмңјлЎң л§Өмҡ° м •нҷ•н•ң кІ°кіјлҘј ліҙмҳҖлӢӨ. GB мЎ°кұҙм—җм„ңлҠ” PнҢҢ мҶҚлҸ„ мһ…л Ҙм—җ л”°лҘё мң„м№ҳм¶”м • мҳӨм°ЁлІ”мң„лҠ” 13.51 cm(Fig. 13a), мҳӨм°ЁмңЁ 27.0%лЎң 3к°Җм§Җ мҶҚлҸ„мЎ°кұҙм—җм„ң к°ҖмһҘ нҒ° мҳӨм°ЁлҘј ліҙмҳҖлӢӨ. н‘ңл©ҙнҢҢ мҶҚлҸ„ м Ғмҡ© мӢң мҳӨм°ЁлІ”мң„лҠ” 5.39 cmмқҙкі мҳӨм°ЁмңЁмқҖ 10.8%мқҙлӢӨ. н•ңнҺё, лӘЁлҚё мҶҚлҸ„ м Ғмҡ© мӢң мҳӨм°ЁлІ”мң„лҠ” 3.45 cmмқҙкі мҳӨм°ЁмңЁмқҖ 6.9%лЎң к°ҖмһҘ лӮ®мқҖ к°’мқ„ ліҙмҳҖлӢӨ. к°Җ진мӣҗкіј м„јм„ң мң„м№ҳк°Җ лӢӨлҘё кІҪмҡ°лҠ” к°Җ진мӣҗкіј м„јм„ңк°Җ к°ҷмқҖ л©ҙмқё кІҪмҡ°мҷҖ 비көҗн•ҳм—¬ м „мІҙм ҒмңјлЎң мҳӨм°ЁмңЁмқҙ м•Ҫ 1.5л°°м—җм„ң 2.5л°° м •лҸ„ мҰқк°Җн•ҳмҳҖлӢӨ.
н•ҙлӢ№ мӢӨн—ҳкІ°кіјлЎңл¶Җн„° к°Җ진мң„м№ҳ(мҶҗмғҒмң„м№ҳ)мҷҖ м„јм„ңк°Җ мң„м№ҳн•ң л©ҙмқҙ лӢӨлҘҙл©ҙ мҳӨм°ЁмңЁмқҙ м»Өм§Ҳ кІғмңјлЎң мҳҲмғҒлҗңлӢӨ. л§Ңм•Ҫ лҢҖмғҒкө¬мЎ°л¬јмқҳ л‘җк»ҳк°Җ мҰқк°Җн•ҳкІҢ лҗҳл©ҙ к· м§Ҳн•ҳм§Җ лӘ»н•ң л§Өм§Ҳмқҳ нҠ№м„ұмқҙ л°ҳмҳҒлҗҳм–ҙ мҳӨм°ЁмңЁмқҙ лҚ” м»Өм§Ҳ мҲҳ мһҲлӢӨ. мқҙмҷҖ к°ҷмқҖ мҳӨм°ЁмңЁмқ„ к°җмҶҢмӢңнӮӨкё° мң„н•ҙм„ңлҠ” мқјм •н•ң мҶҚлҸ„ліҙлӢӨлҠ” лӘЁлҚё мҶҚлҸ„(кұ°лҰ¬м—җ л”°лқј ліҖн•ҳлҠ” мҶҚлҸ„к°’ мӮ¬мҡ©)лҘј мһ…л Ҙк°’мңјлЎң м Ғмҡ©н•ҳлҠ” кІғмқҙ мң„м№ҳ м¶”м •мқҳ м •нҷ•м„ұ н–ҘмғҒ мёЎл©ҙм—җм„ң л°”лһҢм§Ғн• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.
ліё м—°кө¬м—җм„ңлҠ” м„јм„ң л°°м—ҙ мӮ¬лЎҖк°Җ н•ңм •м Ғмқҙкі к°Җ진мӣҗкіј м„јм„ңмқҳ мөңлҢҖ кұ°лҰ¬к°Җ 50 cmлЎң м ңн•ңн•ҳмҳҖлӢӨ. мқҙм—җ л”°лқј, н–Ҙнӣ„ лӢӨм–‘н•ң м„јм„ң л°°м—ҙкіј 50 cm мқҙмғҒмқҳ мёЎм • кұ°лҰ¬м—җм„ң мӢӨн—ҳмқ„ мӢӨмӢңн•ҳм—¬ ліҙлӢӨ мқјл°ҳм Ғмқё мҶҚлҸ„ лӘЁлҚёмқ„ ліҙмҷ„ л°Ҹ м ңмӢңн• мҳҲм •мқҙлӢӨ. лҳҗн•ң лҢҖмғҒ л§Өм§Ҳмқҳ нҠ№м„ұм—җ л”°лҘё мҶҗмғҒмң„м№ҳ м¶”м •мӢӨн—ҳ л°Ҹ 분м„қмқ„ нҶөн•ҳм—¬ мң„м№ҳм¶”м • мҳӨм°ЁмңЁмқ„ мөңмҶҢнҷ” н•ҳкі мһҗ н•ңлӢӨ.
5. кІ° лЎ
ліё м—°кө¬лҠ” м§Җ진과 к°ҷмқҖ мһ¬лӮңм—җ мқҳн•ң кө¬мЎ°л¬ј мҶҗмғҒ мң„м№ҳлҘј нғҗм§Җн•ҳлҠ”лҚ° мһҲм–ҙ н•©лҰ¬м Ғмқё нғ„м„ұнҢҢ мҶҚлҸ„лҘј кІ°м •н•ҳкі мҶҚлҸ„лӘЁл“ңм—җ л”°лҘё мқҢмӣҗ мң„м№ҳ м¶”м •мқҳ м •нҷ•лҸ„лҘј 분м„қн•ҳкі мһҗ н•ҳмҳҖлӢӨ. мқҙм—җ л”°лқј нҢҗнҳ•нғңмқҳ нҷ”к°•м•” мӢңнҺём—җ лҢҖн•ҙ к°Җ진мң„м№ҳм—җ л”°лҘё мӢӨн—ҳмқ„ мӢӨмӢңн•ҳм—¬ PнҢҢ, н‘ңл©ҙнҢҢ, к·ёлҰ¬кі ліё м—°кө¬м—җм„ң м ңм•Ҳн•ң мҶҚлҸ„ лӘЁлҚёмқ„ мқҙмҡ©н•ҳм—¬ мҶҗмғҒмң„м№ҳ м •нҷ•лҸ„лҘј 비көҗ 분м„қн•ҳмҳҖлӢӨ.
нҢҗ нҳ•нғңмқҳ мӢңнҺём—җм„ң к°Җ진мӣҗкіј м„јм„ңмқҳ м„Өм№ҳк°Җ к°ҷмқҖ л©ҙм—җ мһҲлҠ” кІҪмҡ°, к°Җ진мӣҗкіј м„јм„ң мң„м№ҳк°Җ м„ңлЎң лӢӨлҘё кІҪмҡ°м—җ 비н•ҙ лҶ’мқҖ мң„м№ҳм¶”м • м •нҷ•лҸ„лҘј ліҙмҳҖлӢӨ. нҢҗнҳ•нғңмқҳ мӢңнҺём—җм„ң PнҢҢ мҶҚлҸ„лҘј мқҙмҡ©н•ҳл©ҙ мң„м№ҳм¶”м • мҳӨм°Ёк°Җ мғҒлҢҖм ҒмңјлЎң нҒ¬кІҢ л°ңмғқн• мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ. к·ёлҹ¬лӮҳ н‘ңл©ҙнҢҢ мҶҚлҸ„лҘј мң„м№ҳм¶”м •м—җ мӮ¬мҡ©н•ҳл©ҙ PнҢҢ мҶҚлҸ„лҘј м Ғмҡ©н•ҳмҳҖмқ„ л•ҢліҙлӢӨ мҳӨм°ЁмңЁмқҖ нҷ•м—°нһҲ к°җмҶҢн•Ёмқ„ ліҙмҳҖлӢӨ. к·ёлҹ¬лӮҳ м„јм„ңмқҳ кұ°лҰ¬м—җ л”°лқј мӢӨм ң нғ„м„ұнҢҢ мҶҚлҸ„лҘј мёЎм •н•ҙліҙл©ҙ, к°Җ진мӣҗ-м„јм„ңмқҳ кұ°лҰ¬к°Җ мҰқк°Җн•Ём—җ л”°лқј нғ„м„ұнҢҢ мҶҚлҸ„к°Җ к°җмҶҢн•ҳлҠ” кІғмңјлЎң 분м„қлҗҳм—ҲлӢӨ. л”°лқјм„ң, мқҙмҷҖ к°ҷмқҖ кІ°кіјлҠ” PнҢҢ, н‘ңл©ҙнҢҢ мҶҚлҸ„мҷҖ к°ҷмқҖ лӢЁмқј к°’ліҙлӢӨ м „нҢҢнҠ№м„ұм—җ м Ғн•©н•ң мҶҚлҸ„ лӘЁлҚёмқ„ мһ…л Ҙк°’мңјлЎң мӮ¬мҡ©н• л•Ң мҶҗмғҒмң„м№ҳ мҳҲмёЎмқҳ м •нҷ•лҸ„к°Җ лҶ’м•„м§Ҳ мҲҳ мһҲмқҢмқ„ ліҙм—¬мӨҖлӢӨ.
ліё м—°кө¬мқҳ мӢӨн—ҳ л°Ҹ 분м„қ кІ°кіј, кө¬мЎ°л¬ј мҶҗмғҒмң„м№ҳ нҸүк°Җм—җм„ң м„јм„ңмқҳ м„Өм№ҳ кұ°лҰ¬л§ҲлӢӨ к°’мқ„ кІҖмҰқн•ҳм—¬ мһ…л Ҙк°’мңјлЎң м Ғмҡ©н•ҳлҠ” кІғмқҙ н•©лҰ¬м Ғмқё кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. ліё м—°кө¬мқҳ мӢӨн—ҳкІ°кіјлҠ” н–Ҙнӣ„ м§Җ진м—җ мқҳн•ң нҢҗнҳ• кө¬мЎ°л¬ј(лІҪ кө¬мЎ°л¬ј лҳҗлҠ” л§ӨнҠёкё°мҙҲ кө¬мЎ°л¬ј) мҶҗмғҒ мӢң, мҶҗмғҒмң„м№ҳ м¶”м •м—җ мһҲм–ҙ мҳӨм°ЁмңЁмқ„ мөңмҶҢнҷ”н•ҳлҠ”лҚ° мң мҡ©н• кІғмңјлЎң кё°лҢҖлҗңлӢӨ.