

1. 서 론
2018년 발생한 밀양세종병원 화재참사는 소방대의 적극적인 구조 활동에도 불구하고 47명이 사망하고 143명이 부상을 입은 대형화재였다. Lee (2020)는 사고의 분석연구에서 입원환자 대부분이 자력피난이 어려웠으며, 해당 건물에 99명의 환자가 입원해있음에도 10명만 근무하고 있어 신속한 피난이 어려웠다는 점을 지적하였다.
병원 화재 시 자력으로 움직임이 불가능 할 것으로 예상 되는 병원의 입원환자들이나 요양원 등이 입소한 중증 와병 환자들은 혼자서 피난이 불가능하여 피난을 도울 수 있는 조력자가 필요하다.
Jung and Kewon (2020)은 요양병원에서 휠체어, 침대, 보조기구 사용자들의 경우 자력 피난이 어렵고 병목현상을 유발하여 화재 시 인명피해 위험이 크다고 기술하고 있다. 하지만 국내 상황은 이러한 상황에서 원활한 피난이 될 수 있도록 충분한 조력 인원의 확보는 현실적인 어려움이 있다.
Cho et al. (2016)은 국내 의료기관의 간호사 법정 충족률이 매우 낮음을 분석하여, 병원의 간호인력 부족의 문제점을 제시한 바 있다.
NFPA (2015)에서 제공되는 NFPA 101 Life Safety Code에서는 병원에서의 피난전략이 기본적으로는 현 위치에서의 보호(Protect-in-Place or Defend-in-Place)를 제공하도록 하고 있지만, 동일 건물 내 안전지역으로 이동하도록 하는 안전한 장소로의 이동(Relocation) 전략도 같이 사용하고 있다. 이는 피난이 원활하지 않은 거주자를 긴 시간과 많은 인력을 동원하여 외부로 피난하는 것은 매우 비효율적이기 때문에, 화재로 인한 연기와 화염을 차단할 수 있는 방호조치가 된 방화구획을 구축하고 화재발생 지역에서 그렇지 않는 보호된 지역으로 수평 이동시키는 전략을 사용하고 있다.
병원, 요양원, 구금 및 교정 시설 및 기관 시설은 이 전략을 사용하는 시설의 예이다. 이러한 시설은 일반적으로 수평 출입구, 방연구획, 그리고 층간 방화구획 또는 적절한 수단을 사용하여 이동한 거주자를 보호한다.
자력으로 피난이 불가능한 재난약자의 경우 안전지역으로 피난하기 위하여 미끄럼대, 외부 경사로, 조력자의 도움으로의 대피 등의 방법을 사용 할 수 있지만 이 방법 또한 조력자가 필요하며 화재 시 재난약자 및 일반 환자 전부 조력자가 대피를 도와주기엔 상당한 제약이 따른다. 화재 발생 시 자력으로 대피가 어려운 환자들은 조력자가 필요 없는 침대의 자율주행이동이 매우 효과적인 대피수단이 될 수 있다.
재난약자의 대피를 위한 자율주행형 대피 도움장치는 환자를 이송시킬 수 있는 침대에 자율주행장치를 부착한 형태로 되어있으며, 이러한 침대의 이동경로는 [병실] → [복도] → [방화문(방화구획 경계)] → [안전지역] 순으로 수평피난이 이루어진다.
화재 시 대피 도움장치는 조력자가 없이 설정된 안전구역으로 대피가 이루어지게 되며 결과적으로 환자의 대피 완료시간이 줄어들게 된다. 하지만 자율주행으로 움직이는 수평대피 도움장치의 특성 상 설정 위치로의 이동 시 정확성 그리고 이동경로 시 지나게 되는 장애물의 인식 및 회피성, 방화문 턱을 넘을 수 있는 구동성이 검증 되어야 하며 대피가 완료되는 소요시간 또한 고려해야 할 것이다. Choi et al. (2020)은 대피장치의 피난효율성에 대하여 분석연구를 수행하여 발표하였다.
따라서 본 논문은 병원 화재 시 자력피난이 어려운 재난약자의 이동 상황을 고려하여 수평대피도움장치(자율주행 침대)의 자율주행 성능을 평가하는 목적으로 수행되었다. 평가에서 측정되는 자율주행 성능은 설정된 목표지점 도착의 정확성, 소요시간, 장애물 회피 및 통과성능 등을 측정하였다. 이러한 평가항목의 설정은 의도된 성능을 정확하게 발휘하는 지를 판단하는데 필요한 요소들로 설정하였다.
2. 성능평가 적용 시험
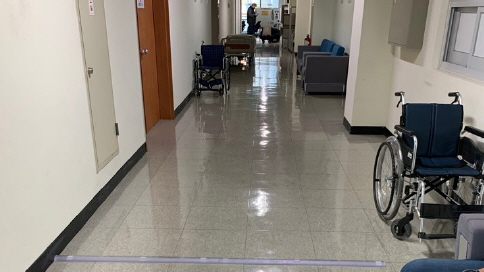
수평대피도움장치의 성능 평가는 요양병원의 복도 특성을 고려하여 직진 주행, 코너 주행, 장애물(휠체어, 의자, 침대) 인식 및 회피 주행으로 설정하였으며 출발지점에서 도착지점까지 각각의 시나리오를 수행하며 이동하게 되고 기본적인 주행 상황과 지정된 기준점에 어느 정도 가깝게 도착하는 지를 평가하였다.
수평대피도움장치에는 실제 환자가 누워있는 상황과 유사성을 확보하기 위하여 Fig. 1과 같이 침대에 150.24 kg의 무게 추 및 마네킹이 적재 되었으며 수평대피도움장치가 장애물, 벽 등에 충돌하였을 경우 확인을 위하여 Fig. 2와 같이 충격감지기를 설치하였다. 충격감지기는 주행 시 진동에 반응하지 않도록 감도를 조절하였으며 동작 시 설치된 경고등과 경보기가 3초간 동작하도록 설정되었다.


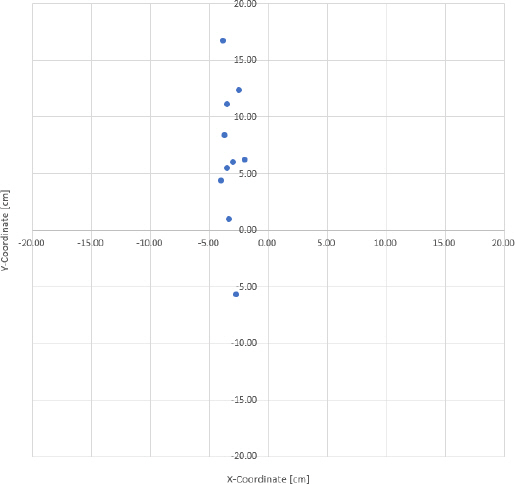
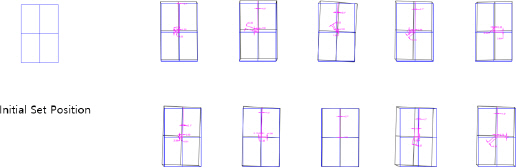
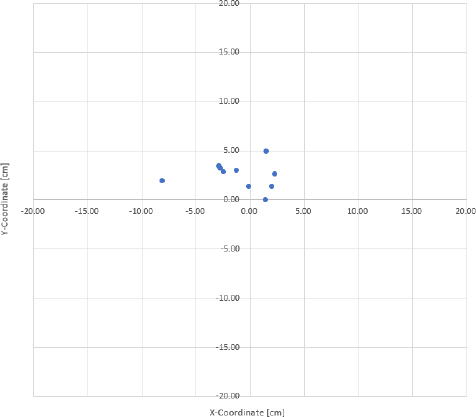
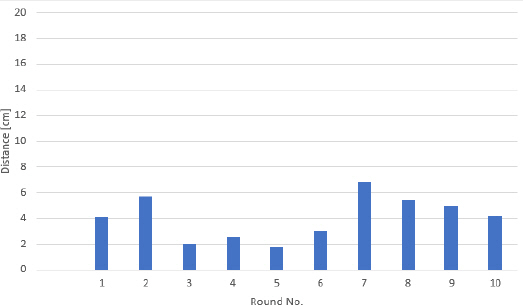
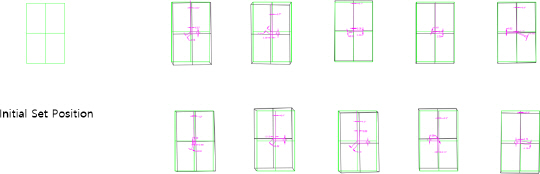
각 시험은 시나리오 당 10회씩 실시하였으며 출발 지점 및 도착지점에는 Fig. 3과 같이 도착위치를 표시할 수 있는 0.1 m × 0.1 m의 체크판 무늬의 격자가 바닥에 설치되었다. 도움장치가 최초 도착한 위치를 기준위치로 하고 이후 도착 시 위치를 최초지점으로부터 X축 방향과 Y축 방향으로 이격거리를 측정하여 기록 하였다. 이를 위해 수평피난 도움장치의 하부에 4개 지점에 적색 마크를 측정 기준점으로 설치하였으며, 최초 위치와 이후 도착 시 측정된 위치는 격자시트 위에 기록하였다. 하부의 측정기준점은 0.7 m × 1.1 m의 직사각형 형태로 배치되었다. Fig. 4는 도착위치 측정 모습이며 측정은 0.5 cm 단위로 하였으므로, X, Y방향 측정은 ± 0.5 cm의 오차범위를 가지게 된다.


3. 시험 수행 및 결과
3.1 직진이동 시험
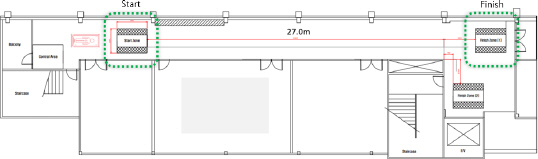
직진이동시험은 Fig. 5와 같이 경로상 장애물은 없으며, 이동거리는 27 m이고 도착지점은 다른 용도 실 입구 앞으로 설정하였다.

3.2 L자 회전 이동시험
L자 회전 이동시험은 Fig. 9와 같이 출발지점에서 도착지점까지 직선으로 이동하다가 L자형 코너를 돌아가는 주행이동 시험이다. 경로상 장애물은 없으며, 이동거리는 30.6 m이고 도착지점은 승강기 탑승 대기 장소이다.


3.3 장애물 지역통과 시험
장애물 지역 통과 시험은 병원 내 이동 상황을 반영하여 L자 회전이동 시험 경로에 3개의 장애물을 배치한 것이다. Fig. 13과 같이 장애물은 복도의 침대가 있는 1코스, 소파와 휠체어가 있는 2코스, 방화문 턱을 가정한 높이 1 cm 턱이 배치된 3코스가 설정되었으며, Fig. 14는 코스에 장애물이 설치된 모습이다.

시험 결과 모든 코스에서는 충돌없이 원활하게 이동하였다. 문턱을 넘을 때 발생하는 진동 등으로 충격센서가 동작하였으나 충돌은 아닌 것으로 판단되었다.

3.4 시험 결과 분석
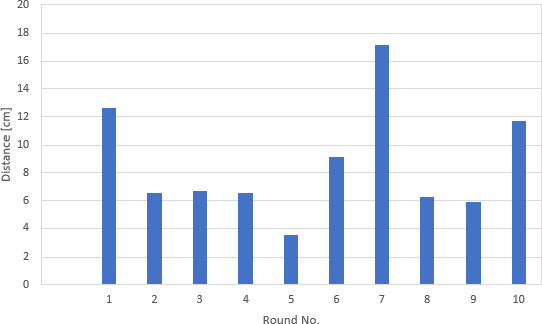
각 3건의 시험 결과는 Table 1과 같으며 시나리오 중 기준위치에서 가장 오차범위가 큰 거리는 직진이동시험에서 17.19 ± 0.71 cm로 가장 높게 나타났다. 또한 10회 시험 평균값도 직진이동시험이 가장 높게 나타났으며, 최초 방향각도로부터 가장 많이 틀어진 각도는 직진 이동시험 및 장애물 시험으로 +4.7°로 나타났다.
Table 1
Test Results
도움장치의 속도는 1 m/s로 설정되어있지만, 이동 중 상황에 대응하므로 구간 거리의 평균 이동속도를 분석해보면 직선시험과 L자 시험은 약 0.42 m/s 정도이지만 장애물 구간은 0.4 m/s로 나타났다. 최저속도 기록을 보면 직진시험은 0.413 m/s, L자 시험은 0.419 m/s를 기록하였지만, 장애물시험은 0.38 m/s로 나타났다. 또한, 모든 시험에서 충돌현상은 발생하지 않았다.
3.5 정확도 및 정밀도 분석
직진이동, L자 회전 이동, 장애물 통과 시험 3가지의 수평피난도움장치(자율주행 침대)의 자율주행 성능평가를 위해 실험수행 결과 정확도와 정밀도를 분석해 보았다. 도움장치가 최초 도착하여 설정한 기준점으로 하고 이후 도착 위치와의 거리는 오차로 보았으며, 본 분석에서 정확도는 절대오차 평균으로 다음 Eq. (1)에 의하여 산정하였다.
여기서 Ei는 오차 이고 N은 측정횟수이다.
정밀도는 표준편차와 상대표준편차로 나타내었다. 표준편차와 상대표준편차는 다음 Eq. (2)에 의하여 산정하였다.
계산된 정확도 및 정밀도는 Table 2와 같다.
4. 결 론
본 연구에서 재난약자 수평 대피도움 장치의 이동 성능평가는 병원 화재 시 자력피난이 어려운 재난약자의 이동 상황을 고려하여 자율주행 성능을 평가하는 목적으로 수행되었다. 평가에서 측정되는 자율주행 성능은 설정된 목표지점 도착의 정확성, 소요시간, 장애물 회피 및 통과성능 등을 측정하였다. 이러한 평가항목의 설정은 의도된 성능을 정확하게 발휘하는 지를 판단하는데 필요한 요소들로 설정하였다.
설정된 시나리오를 적용하여 수행된 시험 결과 초기 설정된 기준위치에서 가장 오차범위가 큰 거리는 직진이동시험에서 17.19 ± 0.71 cm로 가장 높게 나타났다. 또한 10회 시험 평균값도 직진이동시험이 가장 높게 나타났으며, 최초 방향각도로부터 가장 많이 틀어진 각도는 직진 이동시험 및 장애물 시험으로 +4.7°로 나타났다.
이러한 시험의 결과를 통해 재난약자 수평 대피도움 장치의 도착 지점과 수직이동 대기 장소에 대한 지정에 있어서 오차범위에 안전율을 고려한 주차면적을 설정해야 할 것이며, 추후 수평 대피 도움장치와 거동 가능한 환자의 동시다발적인 피난 상황의 추가적인 연구가 필요하다.




