

1. 서 론
2. 연구 방법
2.1 연구절차
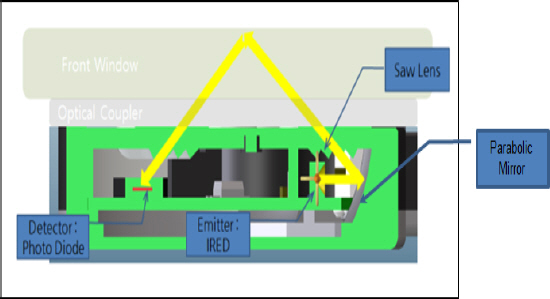
2.2 강우센서 신호 감지 방법

2.3 관계식 산정방법
2.4 적합도 평가방법
3. S (Rainfall Sensor Signal)-R (Rainfall) 관계식 개발
3.1 연구방법
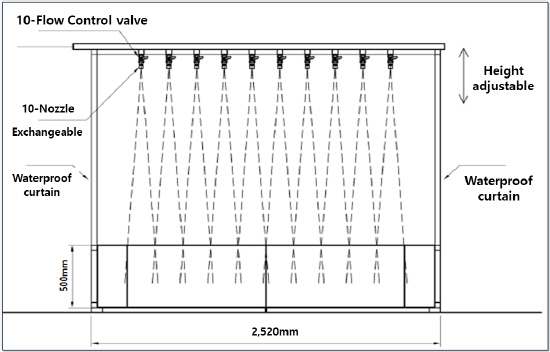
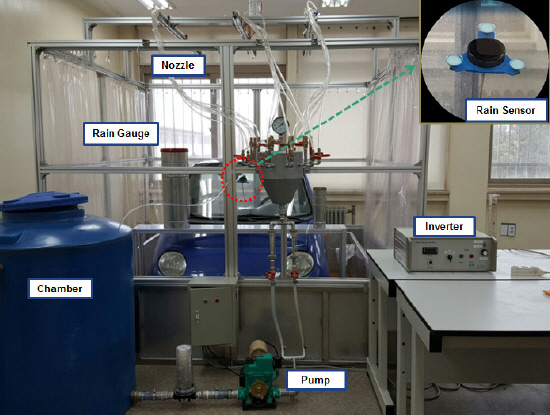
3.2 인공강우 실험실


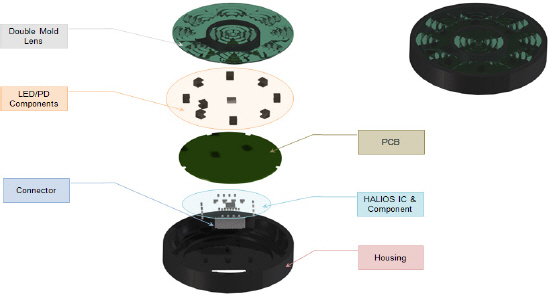
3.3 강우센서
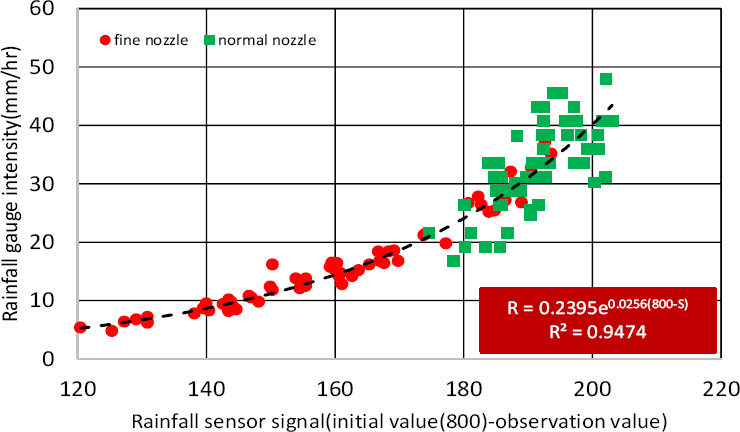
3.4 S-R 관계식 개발
Table 2
Table 3
3.5 S-R 관계식 적합도 평가
Table 4
4. S-R 관계식 현장 적용
4.1 연구방법
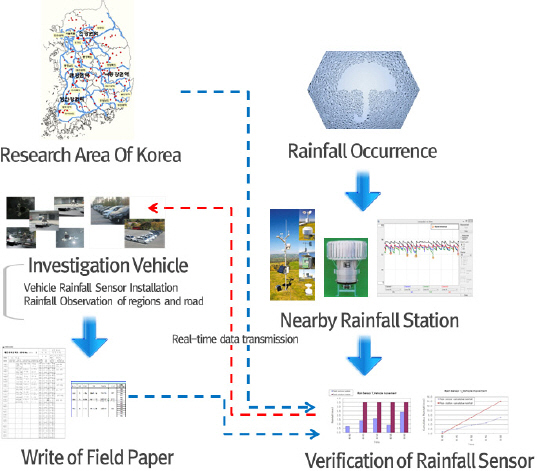
4.2 연구지역

4.3 연구 결과

5. 결 론
(1) 인공강우 발생장치를 이용하는 실내실험을 통해 강우센서 신호와 강우량의 관계를 분석하여 개발한 S (Rainfall Sensor Signal)-R (Rainfall) 관계식은 결정계수(R2)가 0.9474로 상관성이 매우 높은 것으로 분석되었다.
(2) S (Rainfall Sensor Signal)-R (Rainfall) 관계식의 적합도 평가 분석결과 평균절대오차(MAE)는 2.66 mm/hr, 평균제곱근오차(RMSE)는 3.87 mm/hr, 효율성계수(CoE)는 0.89, 일치도지수(IoA)는 0.97로 평균절대오차와 평균제곱근오차 값은 작고 효율성 계수 및 일치도 지수는 1에 가까워 적합도가 매우 높은 것으로 분석되어 미계측 유역에서 강우자료 생산에 활용 가능할 것으로 판단된다.
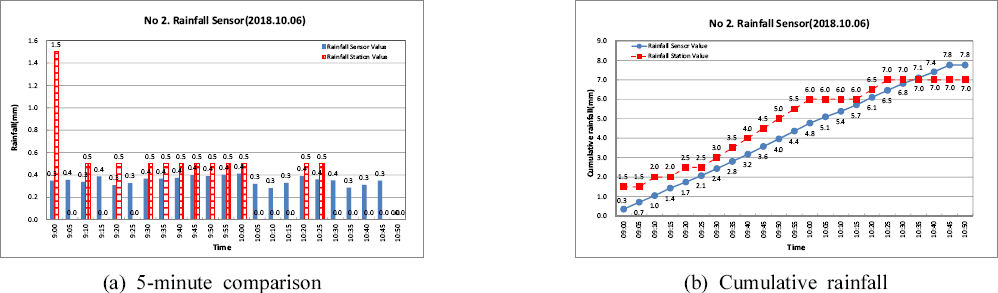
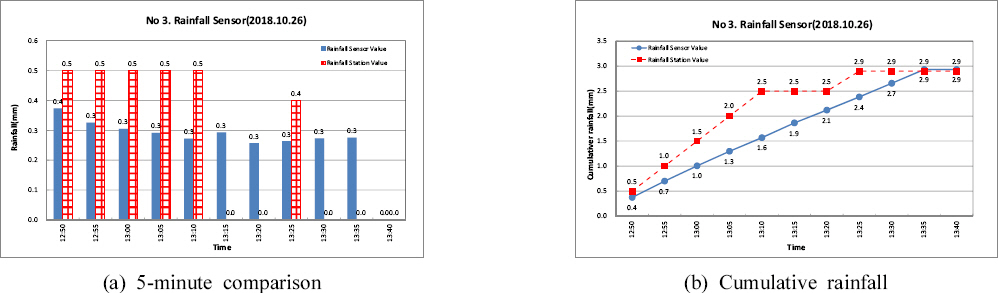
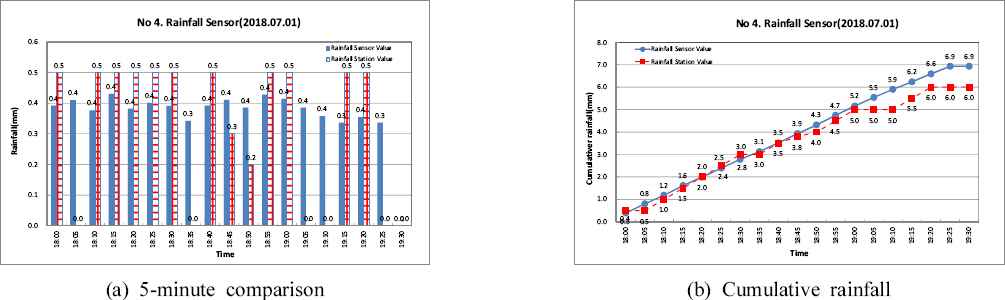
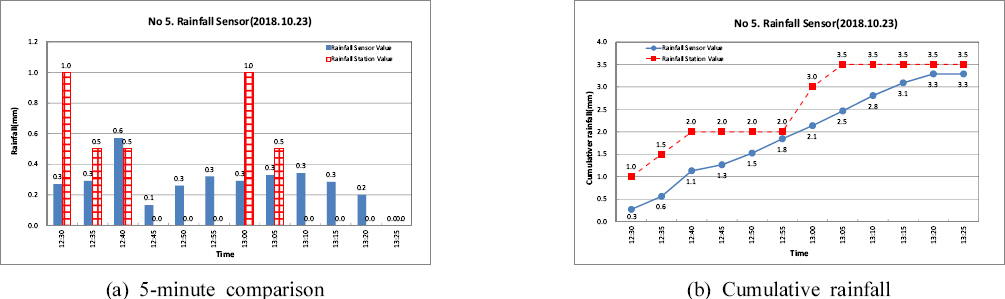
(3) S (Rainfall Sensor Signal)-R (Rainfall) 관계식의 현장 적용성 평가를 위해 차량용 강우센서와 강우관측소 60곳의 계측 데이터를 5분 단위로 분석한 결과 오차율은 0.0%~13.0%로 평균 7.96%의 오차율을 보이는 것으로 분석되었다.
(4) 누적 강우량 검토를 통하여 차량용 강우센서와 강우관측소의 관측 자료를 검토한 결과 차량용 강우센서를 이용할 경우 국지성 호우의 공간적, 시간적 특성을 반영한 강우 데이터 생산이 가능할 것으로 분석되었다.
(5) 본 연구에서 개발된 S-R 관계식은 실내 실험을 통해 개발된 것으로 실제 실외공간에서 바람, 터널⋅교량밑⋅나무밑 등의 지형특성, 차량속도, 주변 차량, 차량의 종류에 따른 앞 유리창의 각도, 앞 유리창의 검지 면적 및 위치 등 다양한 변수로 인해 차량용 센서 계측 값에 대한 변화가 있을 것임을 감안하여 추가 연구를 통해 불확실성을 줄이는 것이 필요하다.




